septiembre 20, 2020
~ 9 MIN
Visión Artificial - Localización
< Blog RSS![]()
Localización
En el post anterior hablamos de diferentes tareas que podemos llevar a cabo con redes neuronales en el campo del visión artificial. Alguno ejemplos son la clasificación de imágenes, la detección de objetos, etc. En este post vamos a ver como llevar a cabo la tarea de localización, que consiste en detectar el objeto principal en una imagen.
El dataset
En la mayoría de ejemplos con los que hemos trabajado hasta ahora nuestro dataset estaba compuesto por un conjunto de imágenes, cada una de las cuales viene acompañada por una etiqueta. Esto nos ha permitido llevar a cabo tareas de clasificación. Sin embargo, para la tarea de localización, no necesitamos un etiqueta sino las "coordenadas" del objeto dentro de la imagen, su posición exacta. Esta posición la definiremos mediante una caja, cuatro valores que nos permitirán localizar el objeto. Para ello usaremos un dataset creado para la detección de objetos: el dataset VOC.
import torch
import torchvision
device = "cuda" if torch.cuda.is_available() else "cpu"
device
'cuda'
train = torchvision.datasets.VOCDetection('./data', download=True)
len(train)
Using downloaded and verified file: ./data\VOCtrainval_11-May-2012.tar
5717
Este dataset contiene imágenes comunes, y en cada una de estas imágenes pueden aparecer un número indeterminado de objetos. Para cada objeto tenemos asignada una caja y su correspondiente etiqueta.
classes = ["background",
"aeroplane",
"bicycle",
"bird",
"boat",
"bottle",
"bus",
"car",
"cat",
"chair",
"cow",
"diningtable",
"dog",
"horse",
"motorbike",
"person",
"pottedplant",
"sheep",
"sofa",
"train",
"tvmonitor"]
img, label = train[0]
img

label
{'annotation': {'folder': 'VOC2012',
'filename': '2008_000008.jpg',
'source': {'database': 'The VOC2008 Database',
'annotation': 'PASCAL VOC2008',
'image': 'flickr'},
'size': {'width': '500', 'height': '442', 'depth': '3'},
'segmented': '0',
'object': [{'name': 'horse',
'pose': 'Left',
'truncated': '0',
'occluded': '1',
'bndbox': {'xmin': '53', 'ymin': '87', 'xmax': '471', 'ymax': '420'},
'difficult': '0'},
{'name': 'person',
'pose': 'Unspecified',
'truncated': '1',
'occluded': '0',
'bndbox': {'xmin': '158', 'ymin': '44', 'xmax': '289', 'ymax': '167'},
'difficult': '0'}]}}
Como puedes observar, ahora nuestras anotaciones son un poco más complicada que una simple etiqueta. Para cada imagen tenemos un dict con las anotaciones en el campo object, que como puedes ver es una lista con la clase en el campo name y las caja en el campo bndbox. Las siguientes funciones son útiles para extraer estas anotaciones en un formato adecuado y hacer la visualización de la imagen junto a las anotaciones.
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as mpatches
import matplotlib.patheffects as PathEffects
import random
def get_sample(ix):
img, label = train[ix]
img_np = np.array(img)
anns = label['annotation']['object']
if type(anns) is not list:
anns = [anns]
labels = np.array([classes.index(ann['name']) for ann in anns])
bbs = [ann['bndbox'] for ann in anns]
bbs = np.array([[int(bb['xmin']), int(bb['ymin']),int(bb['xmax'])-int(bb['xmin']),int(bb['ymax'])-int(bb['ymin'])] for bb in bbs])
anns = (labels, bbs)
return img_np, anns
def plot_anns(img, anns, ax=None, bg=-1):
# anns is a tuple with (labels, bbs)
# bbs is an array of bounding boxes in format [x_min, y_min, width, height]
# labels is an array containing the label
if not ax:
fig, ax = plt.subplots(figsize=(10, 6))
ax.imshow(img)
labels, bbs = anns
for lab, bb in zip(labels, bbs):
if bg == -1 or lab != bg:
x, y, w, h = bb
rect = mpatches.Rectangle((x, y), w, h, fill=False, edgecolor='red', linewidth=2)
text = ax.text(x, y - 10, classes[lab], {'color': 'red'})
text.set_path_effects([PathEffects.withStroke(linewidth=5, foreground='w')])
ax.add_patch(rect)
img_np, anns = get_sample(0)
plot_anns(img_np, anns)
plt.show()

r, c = 3, 4
fig = plt.figure(figsize=(4*c, 4*r))
for _r in range(r):
for _c in range(c):
ax = plt.subplot(r, c, _r*c + _c + 1)
ix = random.randint(0, len(train)-1)
img_np, anns = get_sample(ix)
plot_anns(img_np, anns, ax)
plt.axis("off")
plt.tight_layout()
plt.show()
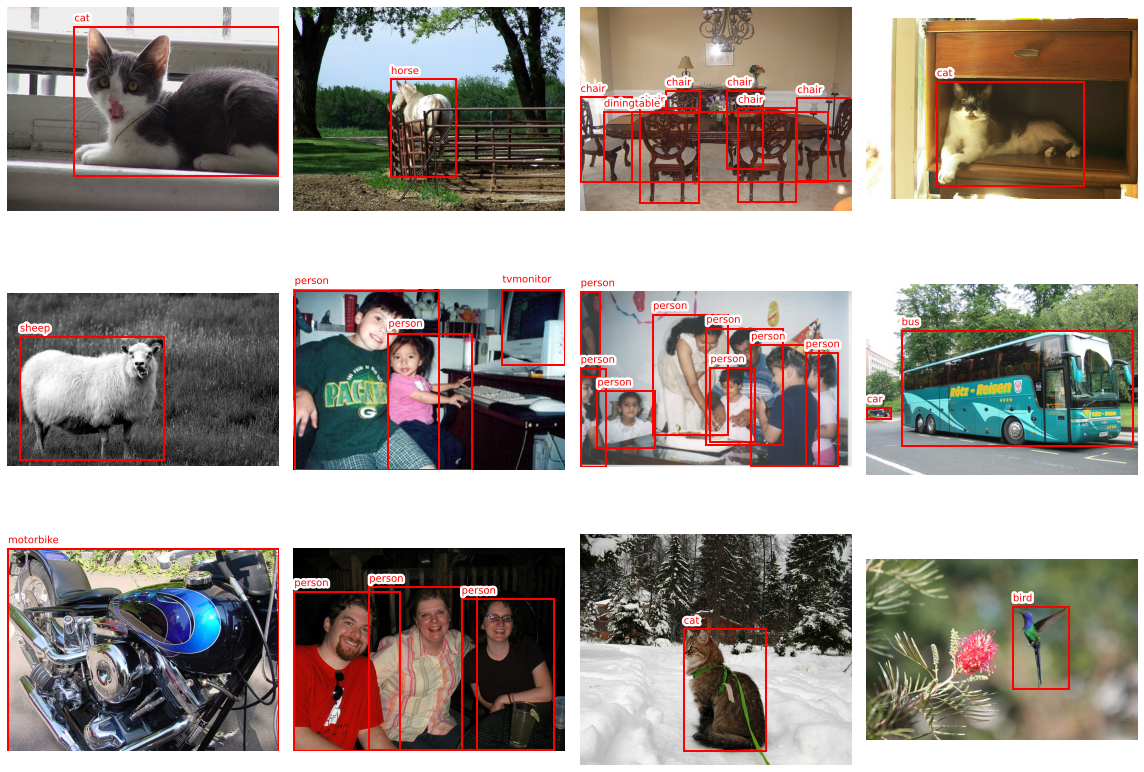
En este dataset encontramos imágenes co nun sólo objeto o muchos objetos, con objetos grandes o objetos pequeños (o ambos), con objetos de la misma clase o diferentes en diferentes parte de la imagen... Como puedes ver existe una gran variabilidad, que hace que el problema de la detección de objetos sea una de las tareas más complejas en el mundo de la visión artificial. Por ahora, nuestro objetivo es solo localizar un objeto en la imagen, y para hacernos la vida más fácil vamos a utilizar una sola imagen con un sólo objeto.
img_np, anns = get_sample(4445)
plot_anns(img_np, anns)
plt.show()
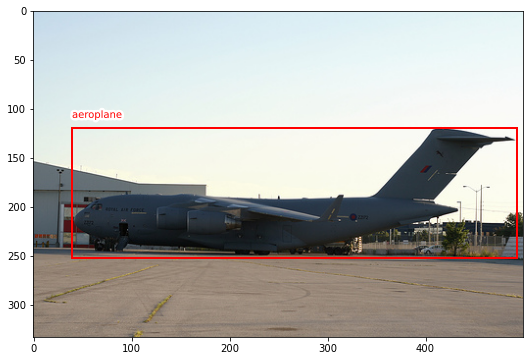
anns
(array([1]), array([[ 39, 119, 454, 133]]))
El modelo
Para poder llevar a cabo la tarea de localización, vamos a tener que diseñar una red neuronal capaz de recibir una imagen y darnos a la salida una caja. Para trabajar con imágenes ya sabes que utilizar redes neuronal convolucionales es la opción correcta, así que simplemente usaremos una CNN con una capa lineal que conecte la salida de la red convolucional a 4 valores. Entonces nuestra tarea consistirá en hacer regresión a estos 4 valores, a diferencia de la clasificación que hemos hecho en posts anteriores.
def block(c_in, c_out, k=3, p=1, s=1, pk=2, ps=2):
return torch.nn.Sequential(
torch.nn.Conv2d(c_in, c_out, k, padding=p, stride=s),
torch.nn.ReLU(),
torch.nn.MaxPool2d(pk, stride=ps)
)
def block2(c_in, c_out):
return torch.nn.Sequential(
torch.nn.Linear(c_in, c_out),
torch.nn.ReLU()
)
class Model(torch.nn.Module):
def __init__(self, n_channels=3, n_outputs=4):
super().__init__()
self.conv1 = block(n_channels, 8)
self.conv2 = block(8, 16)
self.conv3 = block(16, 32)
self.conv4 = block(32, 64)
self.fc1 = block2(64*6*6, 100)
self.fc2 = torch.nn.Linear(100, n_outputs)
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = self.conv3(x)
x = self.conv4(x)
x = x.view(x.shape[0], -1)
x = self.fc1(x)
x = self.fc2(x)
return x
model = Model()
output = model(torch.randn(64, 3, 100, 100))
output.shape
torch.Size([64, 4])
Fit de una muestra
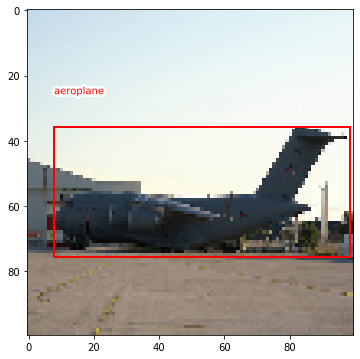
Durante el entrenamiento queremos que la salida de la red coincida con la caja que tenemos en las anotaciones del dataset, de esta manera nuestro modelo aprenderá a predecir cajas alrededor de objetos. En primer lugar haremos un resize de la imagen para que tenga unas dimensiones de 100 x 100 (la CNN ha sido diseñada para esta resolución). En el caso de la clasificación de imágenes, transformar la imagen no tiene impacto en la etiqueta. Ahora, sin embargo, dependiendo de la transformación, nuestras etiquetas pueden variar. Las cajas pueden cambiar de dimensiones, ser rotadas e incluso algunas pueden desaparecer (por ejemplo, si hacemos un crop). Por suerte, la librería albumentations se encarga de todo por nosotros.
import albumentations as A
# with coco format the bb is expected in
# [x_min, y_min, width, height]
def get_aug(aug, min_area=0., min_visibility=0.):
return A.Compose(aug, bbox_params={'format': 'coco', 'min_area': min_area, 'min_visibility': min_visibility, 'label_fields': ['labels']})
trans = get_aug([A.Resize(100, 100)])
labels, bbs = anns
augmented = trans(**{'image': img_np, 'bboxes': bbs, 'labels': labels})
img, bbs, labels = augmented['image'], augmented['bboxes'], augmented['labels']
img.shape, bbs
((100, 100, 3), [(7.8, 35.73573573573574, 90.8, 39.93993993993994)])
Por otro lado, si intentásemos hacer regresión a las coordenadas de la caja nuestra red neuronal tendría problemas ya que puede tomar valores muy grandes. Es por esto que las normalizamos teniendo en cuenta las dimensiones de la imagen, de forma que nuestra red tendrá que predecir valores entre 0 y 1 (una tarea mucho más sencilla).
def norm(bb, shape):
# normalize bb
# shape = (heigh, width)
# bb = [x_min, y_min, width, height]
h, w = shape
return np.array([bb[0]/w, bb[1]/h, bb[2]/w, bb[3]/h])
def unnorm(bb, shape):
# normalize bb
# shape = (heigh, width)
# bb = [x_min, y_min, width, height]
h, w = shape
return np.array([bb[0]*w, bb[1]*h, bb[2]*w, bb[3]*h])
bb = bbs[0]
bb
(7.8, 35.73573573573574, 90.8, 39.93993993993994)
bb_norm = norm(bb, img.shape[:2])
bb_norm
array([0.078 , 0.35735736, 0.908 , 0.3993994 ])
bb_unnorm = unnorm(bb_norm, img.shape[:2])
bb_unnorm
array([ 7.8 , 35.73573574, 90.8 , 39.93993994])
plot_anns(img, (labels, bbs))
plt.show()
Ahora ya podemos intentar hacer el fit de la imagen.
def fit(model, X, y, epochs=1, lr=1e-3):
model.to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=lr)
criterion = torch.nn.L1Loss()
for epoch in range(1, epochs+1):
model.train()
train_loss = []
X, y = X.to(device), y.to(device)
optimizer.zero_grad()
y_hat = model(X)
loss = criterion(y_hat, y)
loss.backward()
optimizer.step()
train_loss.append(loss.item())
print(f"Epoch {epoch}/{epochs} loss {np.mean(train_loss):.5f}")
model = Model()
img_tensor = torch.FloatTensor(img / 255.).permute(2,0,1).unsqueeze(0)
bb_tensor = torch.FloatTensor(bb_norm).unsqueeze(0)
fit(model, img_tensor, bb_tensor, epochs=30)
Epoch 1/30 loss 0.42344
Epoch 2/30 loss 0.38265
Epoch 3/30 loss 0.33241
Epoch 4/30 loss 0.24641
Epoch 5/30 loss 0.23387
Epoch 6/30 loss 0.21353
Epoch 7/30 loss 0.21370
Epoch 8/30 loss 0.16086
Epoch 9/30 loss 0.11926
Epoch 10/30 loss 0.09259
Epoch 11/30 loss 0.06808
Epoch 12/30 loss 0.05235
Epoch 13/30 loss 0.07411
Epoch 14/30 loss 0.07906
Epoch 15/30 loss 0.05251
Epoch 16/30 loss 0.02518
Epoch 17/30 loss 0.03549
Epoch 18/30 loss 0.03219
Epoch 19/30 loss 0.03091
Epoch 20/30 loss 0.05019
Epoch 21/30 loss 0.04707
Epoch 22/30 loss 0.04215
Epoch 23/30 loss 0.04340
Epoch 24/30 loss 0.02576
Epoch 25/30 loss 0.03546
Epoch 26/30 loss 0.02787
Epoch 27/30 loss 0.01715
Epoch 28/30 loss 0.02680
Epoch 29/30 loss 0.01948
Epoch 30/30 loss 0.03434
model.eval()
pred_bb_norm = model(img_tensor.to(device))[0].cpu().detach().numpy()
pred_bb = unnorm(pred_bb_norm, img.shape[:2])
plot_anns(img, (anns[0], [pred_bb]))
plt.show()
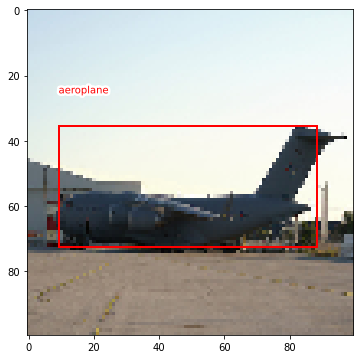
Si te fijas en el bucle de entrenamiento hemos utilizado una función de pérdida L1. Ésta función de pérdida es más suave que la MSE (la que hemos utilizado anteriormente para problemas de regresión) y para localización suele funcionar mejor.
En este punto, ¿Te ves capaz de entrenar un modelo de localización para éste dataset? Podrías intentar filtrarlo para quedarte con aquellas muestras que sólo tengan una caja y después implementar un bucle de entrenamiento completo con validación (tienes ejemplos en los posts anteriores). Al tratarse de imágenes naturales, también puedes utilizar una red pre-entrenada y hacer transfer learning (en este caso recuerda hacer el resize al mismo tamaño que el de la red original).
Resumen
En este post hemos visto como llevar a cabo la tarea de localización con redes neuronales. Nuestro modelo acepta imágenes a la entrada y a la salida nos da 4 valores: las coordenadas en la imagen de la caja que engloba el objeto de interés. Para ello enfocamos la tarea como un problema de regresión. Si bien hemos sido capaces de encontrar estas cajas alrededor de objetos, nuestro modelo no es capaz de decirnos qué objeto es. Esta es la tarea de localización + clasificación, que veremos en el siguiente post.