septiembre 17, 2021
~ 15 MIN
PerceiverIO - ¿La red neuronal definitiva?
< Blog RSS![]()
PerceiverIO: ¿La red neuronal definitiva?
Este es el primero en una serie de posts en los que vamos a aprender sobre la arquitectura de red neuronal conocida como PerceiverIO.

Este arquitectura, introducida por DeepMind, está diseñada para aceptar cualquier tipo de inputs (imágenes, vídeos, texto, nubes de puntos, audio, incluso combinaciones de los mismos) y producir cualquier tipo de output (clasificación, segmentación de imágenes, generación de texto, etc). Para ello se basa en la arquitectura de Transformers (de la cual hemos hablado en posts anteriores) para el procesamiento de características intermedias y proyecciones, tanto a la entrada como a la salida. De cumplir lo que promete, este modelo sería capaz de llevar a cabo multitud de tareas que hoy en día requieren de diferentes arquitecturas específicas que pueden funcionar bien en un dominio pero no en otros. Tener una única arquitectura puede ser muy atractivo para muchas aplicaciones, ya que es más fácil de optimizar. Además, las arquitecturas basadas en Transformers no hacen presunciones sobre la naturaleza de los datos (como lo hace las redes convolucionales o recurrentes) eliminando posibles fuentes de sesgo y aumentando la flexibilidad y capacidad de generalización. En este post y los siguientes vamos a aprender sobre esta arquitectura y ver si realmente nos da lo que promete 😀
Perceiver
Antes de meternos de lleno con la arquitectura de PercieverIO vamos a trabajar con la arquitectura Perceiver, un modelo desarrollado por los mismos autores y que sienta las bases para el modelo más general. En el siguiente video del canal de Yannic Kilcker encontrarás una muy buena explicación (en inglés) del modelo y cómo funciona. Este otro video también es muy útil.

Como puedes ver en el diagrama anterior el modelo está basado en la arquitectura Transoformers. Sin embargo, existe una gran diferencia. En la arquitectura Transformers original, usamos el mismo tensor como query, keys y values para calcular la matriz de atención y aplicar las operaciones de multi-head self attention. En la arquitectura Perceiver, sin embargo, usamos dos tensores diferentes, uno para la query y otro para las keys y values. Aquí la clave es ver que las dimensiones de los tensores son diferentes, siendo la dimensión resultantes de aplicar el mecanismo de atención mucho menor que la original. De esta manera, el modelo es capaz de trabajar con inputs de dimensión arbitraria (lo que permite la multi-modalidad) y más grandes que la posible en Transformers, ya que se reduce a un valor más pequeño para las siguientes capas. Esta operación se utiliza a la entrada del modelo, a partir de la cual ya sí que usa un Transformer "normal y corriente". La segunda diferencia es que los inputs de la red son utilizados varias veces durante el forward, similar a lo que hacemos con redes recurrentes. De esta manera, el modelo es capaz de extraer la información necesaria de los inputs en varias etapas. Por último, el Perceiver reutiliza (de manera opcional) los pesos de varias capas, de nuevo similar a lo que hacemos en redes recurrentes (aunque en vez de darle datos en diferentes pasos de tiempo, le damos los mismos datos todo el rato). El modelo de PerceiverIO simplemente añadirá la capacidad de generar outputs de diferentes dimensiones, pero de esto hablaremos en posts futuros. Ahora, vamos a ver todas estas características poco a poco, en la implementación de la arquitectura Perceiver en Pytorch con un ejemplo de aplicación en la clasificación de imágenes.
Cross-Attention
La primera capa que vemos en el modelo es la de cross-attention. Esta capa está basada en mecanismos de atención, self-attention y multi-head self-attention de lo que ya hemos hablado en detalle en los posts linkados. Si no estás familiarizado con estos conceptos, te recomiendo encarecidamente que inviertas un poco de tiempo en ello ya que te será muy útil de ahora en adelante para entender bien cómo funciona el Perceiver. La siguiente clase implementa el cálculo del multi-head self-attention, la principal característica es el uso de diferentes tensores para las queries y las keys y values.
# https://github.com/karpathy/minGPT/blob/master/mingpt/model.py
# https://github.com/esceptico/perceiver-io/blob/master/src/perceiver/attention.py
import math
import torch
class MultiHeadAttention(torch.nn.Module):
def __init__(self, kv_dim, q_dim, n_heads=1, attn_pdrop=0., resid_pdrop=0.):
super().__init__()
self.n_embd = q_dim
self.n_heads = n_heads
assert self.n_embd % self.n_heads == 0
# key, query, value projections
self.key = torch.nn.Linear(kv_dim, self.n_embd)
self.query = torch.nn.Linear(q_dim, self.n_embd)
self.value = torch.nn.Linear(kv_dim, self.n_embd)
# regularization
self.attn_drop = torch.nn.Dropout(attn_pdrop)
self.resid_drop = torch.nn.Dropout(resid_pdrop)
# output projection
self.proj = torch.nn.Linear(self.n_embd, q_dim)
def forward(self, kv, q, mask = None):
B, M, C = kv.size()
B, N, D = q.size()
# calculate query, key, values for all heads in batch and move head forward to be the batch dim
k = self.key(kv).view(B, M, self.n_heads, D // self.n_heads).transpose(1, 2) # (B, nh, M, hs)
q = self.query(q).view(B, N, self.n_heads, D // self.n_heads).transpose(1, 2) # (B, nh, N, hs)
v = self.value(kv).view(B, M, self.n_heads, D // self.n_heads).transpose(1, 2) # (B, nh, M, hs)
# attention (B, nh, N, hs) x (B, nh, hs, M) -> (B, nh, N, M)
att = (q @ k.transpose(-2, -1)) * (1.0 / math.sqrt(k.size(-1)))
if mask is not None:
att = att.masked_fill(self.mask[:,:,:N,:M] == 0, float('-inf'))
att = torch.nn.functional.softmax(att, dim=-1)
att = self.attn_drop(att)
y = att @ v # (B, nh, N, M) x (B, nh, M, hs) -> (B, nh, N, hs)
y = y.transpose(1, 2).contiguous().view(B, N, D) # re-assemble all head outputs side by side
return self.resid_drop(self.proj(y)) # B, N, D
mha = MultiHeadAttention(3, 512, n_heads=2)
mha
MultiHeadAttention(
(key): Linear(in_features=3, out_features=512, bias=True)
(query): Linear(in_features=512, out_features=512, bias=True)
(value): Linear(in_features=3, out_features=512, bias=True)
(attn_drop): Dropout(p=0.0, inplace=False)
(resid_drop): Dropout(p=0.0, inplace=False)
(proj): Linear(in_features=512, out_features=512, bias=True)
)
kv = torch.randn((32, 28*28, 3)) # B, num pixels (num patches en vit), num channels (n_embed en vit)
q = torch.randn((32, 128, 512))
mask = None
outputs = mha(kv, q, mask)
outputs.shape
torch.Size([32, 128, 512])
Perceiver
En el ejemplo anterior le hemos dado valores aleatorios de query, keys y values. Sin embargo, en la arquitectura final aprenderemos los valores de q a la entrada (de manera que el modelo podrá elegir aquellas queries más útiles). Para las capas intermedias, tanto query, keys y values serán las mismas, y vendrán de la salida de la capa anterior.
class Block(torch.nn.Module):
def __init__(self, kv_dim, q_dim, n_heads=1, attn_pdrop=0., resid_pdrop=0.):
super().__init__()
self.ln1_kv = torch.nn.LayerNorm(kv_dim)
self.ln1_q = torch.nn.LayerNorm(q_dim)
self.ln2 = torch.nn.LayerNorm(q_dim)
self.attn = MultiHeadAttention(kv_dim, q_dim, n_heads, attn_pdrop, resid_pdrop)
self.mlp = torch.nn.Sequential(
torch.nn.Linear(q_dim, 4 * q_dim),
torch.nn.GELU(),
torch.nn.Linear(4 * q_dim, q_dim),
torch.nn.Dropout(resid_pdrop),
)
def forward(self, kv, q, mask=None):
x = q + self.attn(self.ln1_kv(kv), self.ln1_q(q), mask)
x = x + self.mlp(self.ln2(x))
return x
class Perceiver(torch.nn.Module):
# ejemplo sin recurrencia para clasificación
def __init__(self, num_latents, latent_dim, input_dim, num_blocks, n_heads=1, attn_pdrop=0., resid_pdrop=0.):
# se podrían separar los params en función de si es cross o self ...
super().__init__()
self.num_blocks = num_blocks
self.latents = torch.nn.Parameter(torch.randn(num_latents, latent_dim))
# encode
self.cross_attn = Block(
kv_dim=input_dim,
q_dim=latent_dim,
n_heads=n_heads,
attn_pdrop=attn_pdrop,
resid_pdrop=resid_pdrop
)
# process
self.self_attention_blocks = torch.nn.ModuleList([
Block( # se podrían hacer bloques diferenciados para en el forward pasar solo x
kv_dim=latent_dim,
q_dim=latent_dim,
n_heads=n_heads,
attn_pdrop=attn_pdrop,
resid_pdrop=resid_pdrop
) for _ in range(num_blocks)
])
def forward(self, x, mask = None):
B = x.size(0)
if mask is not None:
mask = mask[None, None, :, :] # esto no se si está bien :S
x = self.cross_attn(
kv=x,
q=self.latents.repeat(B, 1, 1),
mask=mask
)
for _ in range(self.num_blocks):
for self_attn_layer in self.self_attention_blocks:
x = self_attn_layer(x, x)
return x
model = Perceiver(num_latents=128, latent_dim=512, input_dim=3, num_blocks=2, n_heads=2)
model
Perceiver(
(cross_attn): Block(
(ln1_kv): LayerNorm((3,), eps=1e-05, elementwise_affine=True)
(ln1_q): LayerNorm((512,), eps=1e-05, elementwise_affine=True)
(ln2): LayerNorm((512,), eps=1e-05, elementwise_affine=True)
(attn): MultiHeadAttention(
(key): Linear(in_features=3, out_features=512, bias=True)
(query): Linear(in_features=512, out_features=512, bias=True)
(value): Linear(in_features=3, out_features=512, bias=True)
(attn_drop): Dropout(p=0.0, inplace=False)
(resid_drop): Dropout(p=0.0, inplace=False)
(proj): Linear(in_features=512, out_features=512, bias=True)
)
(mlp): Sequential(
(0): Linear(in_features=512, out_features=2048, bias=True)
(1): GELU()
(2): Linear(in_features=2048, out_features=512, bias=True)
(3): Dropout(p=0.0, inplace=False)
)
)
(self_attention_blocks): ModuleList(
(0): Block(
(ln1_kv): LayerNorm((512,), eps=1e-05, elementwise_affine=True)
(ln1_q): LayerNorm((512,), eps=1e-05, elementwise_affine=True)
(ln2): LayerNorm((512,), eps=1e-05, elementwise_affine=True)
(attn): MultiHeadAttention(
(key): Linear(in_features=512, out_features=512, bias=True)
(query): Linear(in_features=512, out_features=512, bias=True)
(value): Linear(in_features=512, out_features=512, bias=True)
(attn_drop): Dropout(p=0.0, inplace=False)
(resid_drop): Dropout(p=0.0, inplace=False)
(proj): Linear(in_features=512, out_features=512, bias=True)
)
(mlp): Sequential(
(0): Linear(in_features=512, out_features=2048, bias=True)
(1): GELU()
(2): Linear(in_features=2048, out_features=512, bias=True)
(3): Dropout(p=0.0, inplace=False)
)
)
(1): Block(
(ln1_kv): LayerNorm((512,), eps=1e-05, elementwise_affine=True)
(ln1_q): LayerNorm((512,), eps=1e-05, elementwise_affine=True)
(ln2): LayerNorm((512,), eps=1e-05, elementwise_affine=True)
(attn): MultiHeadAttention(
(key): Linear(in_features=512, out_features=512, bias=True)
(query): Linear(in_features=512, out_features=512, bias=True)
(value): Linear(in_features=512, out_features=512, bias=True)
(attn_drop): Dropout(p=0.0, inplace=False)
(resid_drop): Dropout(p=0.0, inplace=False)
(proj): Linear(in_features=512, out_features=512, bias=True)
)
(mlp): Sequential(
(0): Linear(in_features=512, out_features=2048, bias=True)
(1): GELU()
(2): Linear(in_features=2048, out_features=512, bias=True)
(3): Dropout(p=0.0, inplace=False)
)
)
)
)
outputs = model(torch.randn((32, 28*28, 3))) # B, num pixels (num patches en vit), num channels (n_embed en vit)
outputs.shape
torch.Size([32, 128, 512])
Clasificación de imágenes
Vamos a entrenar un clasificador de imágenes usando la arquitectura Perceiver. Para ello, usaremos el dataset CIFAR10.
import torchvision
import numpy as np
class Dataset(torch.utils.data.Dataset):
def __init__(self, train=True):
trainset = torchvision.datasets.CIFAR10(root='./data', train=train, download=True)
self.classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
self.imgs, self.labels = np.array([np.array(i[0]) for i in trainset]), np.array([i[1] for i in trainset])
def __len__(self):
return len(self.imgs)
def __getitem__(self, ix):
img = self.imgs[ix]
return torch.from_numpy(img / 255.).float(), torch.tensor(self.labels[ix]).long()
ds = {
'train': Dataset(),
'test': Dataset(train=False)
}
ds['train'].imgs.shape, ds['test'].imgs.shape
Files already downloaded and verified
Files already downloaded and verified
((50000, 32, 32, 3), (10000, 32, 32, 3))
batch_size = 64
num_workers = 0
dl = {
'train': torch.utils.data.DataLoader(ds['train'], batch_size=batch_size, shuffle=True, num_workers=num_workers),
'test': torch.utils.data.DataLoader(ds['test'], batch_size=batch_size, shuffle=False, num_workers=num_workers)
}
imgs, labels = next(iter(dl['train']))
imgs.shape, labels.shape
(torch.Size([64, 32, 32, 3]), torch.Size([64]))
import matplotlib.pyplot as plt
fig = plt.figure(dpi=200)
c, r = 6, 4
for j in range(r):
for i in range(c):
ix = j*c + i
ax = plt.subplot(r, c, ix + 1)
img, label = imgs[ix], labels[ix]
ax.imshow(img)
ax.set_title(ds['train'].classes[labels[ix].item()], fontsize=6)
ax.axis('off')
plt.tight_layout()
plt.show()
Como ya comentamos en los posts anteriores, los Transformers son equivariantes al orden de las entradas. Esto significa que no prestan atención al orden en el que la damos los inputs, lo cual puede ser importante para la tarea en cuestión. En el caso de las redes convolucionales, este concepto se introduce de manera intrínsica en el modelo (usando kernels que solo prestan atención al entorno más cercano de los pixeles, y reusando los kernels en toda la imágen). En el caso de los Transformers, la solución más común es el uso de positional encoding. Éstos pueden ser aprendidos (como vimos en los ejemplos de ViT) o fijados. En el caso del Perceiver, los autores proponen el uso de Fourier features, que consiste en concatenar en la dimensión de los canales, para cada pixel de la imagen, una serie de valores que codifican su posición relativa para que el modelo pueda usar esta información.
from math import pi, log
def fourier_encode(x, max_freq, num_bands = 4, base = 2):
x = x.unsqueeze(-1)
device, dtype, orig_x = x.device, x.dtype, x
scales = torch.logspace(0., log(max_freq / 2) / log(base), num_bands, base = base, device = device, dtype = dtype)
scales = scales[(*((None,) * (len(x.shape) - 1)), ...)]
x = x * scales * pi
x = torch.cat([x.sin(), x.cos()], dim=-1)
x = torch.cat((x, orig_x), dim = -1)
return x
# https://github.com/lucidrains/perceiver-pytorch/blob/main/perceiver_pytorch/perceiver_pytorch.py
from einops import rearrange, repeat
b, *axis, _, device = *imgs.shape, imgs.device
# por cada eje, tantos valores como píxeles entre -1 y 1
axis_pos = list(map(lambda size: torch.linspace(-1., 1., steps = size, device = device), axis))
print(axis_pos[0].shape, axis_pos[1].shape)
# para cada pixel, su posición para cada eje
pos = torch.stack(torch.meshgrid(*axis_pos), dim = -1)
print(pos.shape)
# añadimos fourier features
max_freq, num_freq_bands, freq_base = 10, 6, 2
enc_pos = fourier_encode(pos, max_freq, num_freq_bands, base = freq_base)
print(enc_pos.shape)
# reordenar dimensiones y repetir para todo el batch
enc_pos = rearrange(enc_pos, '... n d -> ... (n d)')
print(enc_pos.shape)
enc_pos = repeat(enc_pos, '... -> b ...', b = b)
print(enc_pos.shape)
torch.Size([32]) torch.Size([32])
torch.Size([32, 32, 2])
torch.Size([32, 32, 2, 13])
torch.Size([32, 32, 26])
torch.Size([64, 32, 32, 26])
Así pues, alimentaremos nuestro modelo con batches de imágenes de dimensiones , añadiremos el positional encoding y "estiraremos" la imagen para tener una secuencia de pixels de dimensiones . Esto se lo daremos a nuestro Perceiver, que proyectará estas imágenes a la dimensión latente (de la cual nosotros controlamos su dimensión) y las procesará en capas consecutivas de Transformer. Finalmente, calcularemos el valor medio de las últimas características y aplicaremos un clasificador lineal que nos dará la distribución de probabilidad sobre las diferentes clases, exactamente igual que hacemos con redes convolucionales.
# https://github.com/lucidrains/perceiver-pytorch/blob/main/perceiver_pytorch/perceiver_pytorch.py
class Model(torch.nn.Module):
def __init__(self, num_classes, max_freq, num_freq_bands, num_latents, latent_dim, input_dim, num_blocks, freq_base = 2, n_heads=1, attn_pdrop=0., resid_pdrop=0.):
super().__init__()
self.num_freq_bands = num_freq_bands
self.freq_base = freq_base
self.max_freq = max_freq
fourier_channels = (2 * ((num_freq_bands * 2) + 1))
input_dim += fourier_channels
self.perceiver = Perceiver(num_latents, latent_dim, input_dim, num_blocks, n_heads, attn_pdrop, resid_pdrop)
self.fc = torch.nn.Linear(latent_dim, num_classes)
def forward(self, x, mask = None):
# fourier encoding
b, *axis, _, device = *x.shape, x.device
axis_pos = list(map(lambda size: torch.linspace(-1., 1., steps = size, device = device), axis))
pos = torch.stack(torch.meshgrid(*axis_pos), dim = -1)
enc_pos = fourier_encode(pos, self.max_freq, self.num_freq_bands, base = self.freq_base)
enc_pos = rearrange(enc_pos, '... n d -> ... (n d)')
enc_pos = repeat(enc_pos, '... -> b ...', b = b)
x = torch.cat((x, enc_pos), dim = -1)
x = rearrange(x, 'b ... d -> b (...) d')
# apply perceiver
x = self.perceiver(x, mask)
# final classification
return self.fc(x.mean(1))
model = Model(num_classes=10, max_freq=10, num_freq_bands=6, num_latents=256, latent_dim=512, input_dim=3, num_blocks=2)
outputs = model(imgs)
outputs.shape
torch.Size([64, 10])
Ahora ya podemos entrenar nuestro modelo como hemos hecho tantas veces anteriormente.
from tqdm import tqdm
import torch.nn.functional as F
def step(model, batch, device):
x, y = batch
x, y = x.to(device), y.to(device)
y_hat = model(x)
loss = F.cross_entropy(y_hat, y)
acc = (torch.argmax(y_hat, axis=1) == y).sum().item() / y.size(0)
return loss, acc
def train(model, dl, optimizer, epochs=10, device="cuda", overfit=False):
model.to(device)
hist = {'loss': [], 'acc': [], 'test_loss': [], 'test_acc': []}
for e in range(1, epochs+1):
# train
model.train()
l, a = [], []
bar = tqdm(dl['train'])
# como cambiar el shuffle a False si overfit ?
for batch in bar:
optimizer.zero_grad()
loss, acc = step(model, batch, device)
loss.backward()
optimizer.step()
l.append(loss.item())
a.append(acc)
bar.set_description(f"training... loss {np.mean(l):.4f} acc {np.mean(a):.4f}")
if overfit:
break
hist['loss'].append(np.mean(l))
hist['acc'].append(np.mean(a))
# eval
model.eval()
l, a = [], []
if overfit:
bar = tqdm(dl['train'])
else:
bar = tqdm(dl['test'])
with torch.inference_mode():
for batch in bar:
loss, acc = step(model, batch, device)
l.append(loss.item())
a.append(acc)
bar.set_description(f"testing... loss {np.mean(l):.4f} acc {np.mean(a):.4f}")
if overfit:
break
hist['test_loss'].append(np.mean(l))
hist['test_acc'].append(np.mean(a))
# log
log = f'Epoch {e}/{epochs}'
for k, v in hist.items():
log += f' {k} {v[-1]:.4f}'
print(log)
return hist
import pandas as pd
def plot_hist(hist):
fig = plt.figure(figsize=(10, 3), dpi=100)
df = pd.DataFrame(hist)
ax = plt.subplot(1, 2, 1)
df[['loss', 'test_loss']].plot(ax=ax)
ax.grid(True)
ax = plt.subplot(1, 2, 2)
df[['acc', 'test_acc']].plot(ax=ax)
ax.grid(True)
plt.show()
model = Model(num_classes=10, max_freq=5, num_freq_bands=3, num_latents=32, latent_dim=32, input_dim=3, num_blocks=3)
optimizer = torch.optim.Adam(model.parameters(), lr=5e-4)
dl = {
'train': torch.utils.data.DataLoader(ds['train'], batch_size=64, shuffle=True, num_workers=0),
'test': torch.utils.data.DataLoader(ds['test'], batch_size=64, shuffle=False, num_workers=0)
}
hist = train(model, dl, optimizer, epochs=30, overfit=False)
plot_hist(hist)
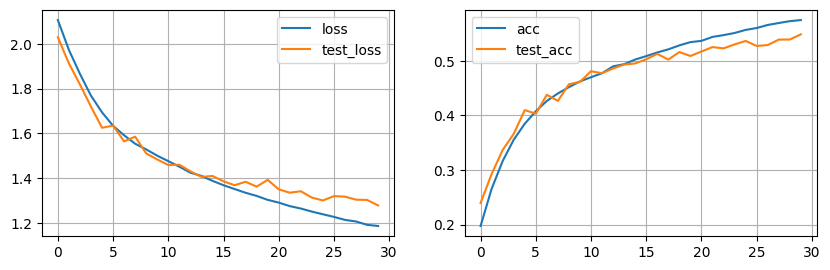
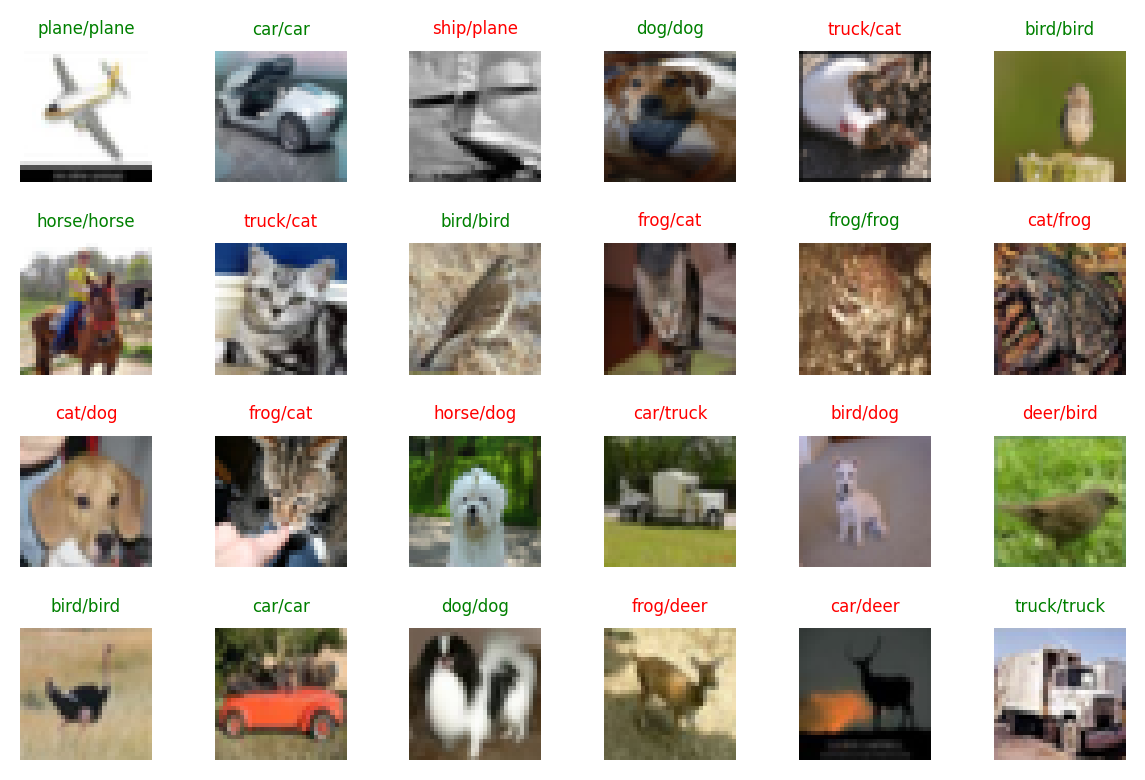
Tras 30 epochs nuestro modelo está convergiendo ! Los resultados no son nada del otro mundo, sin embargo es un buen punto de partida para empezar a experimentar con esta nueva arquitectura de red neuronal.
imgs, labels = next(iter(dl['train']))
model.eval()
with torch.inference_mode():
logits = model(imgs.cuda())
preds = torch.argmax(logits, axis=1).cpu()
preds.shape
torch.Size([64])
fig = plt.figure(dpi=200)
c, r = 6, 4
for j in range(r):
for i in range(c):
ix = j*c + i
ax = plt.subplot(r, c, ix + 1)
img, label = imgs[ix], labels[ix]
ax.imshow(img)
gt = ds['test'].classes[labels[ix].item()]
pr = ds['test'].classes[preds[ix].item()]
ax.set_title(f'{pr}/{gt}', fontsize=6, color='green' if pr == gt else 'red')
ax.axis('off')
plt.tight_layout()
plt.show()
En el siguiente post extenderemos nuestra arquitectura para adaptarla al modelo de PerceiverIO, a partir de lo cual empezaremos a experimentar con diferentes tareas y modalidades de datos para demostrar la potencialidad de esta red neuronal.
Resumen
En este post hemos introducido la arquitectura de red neuronal Perceiver, base del modelo más avanzado Perceiver IO que veremos en los siguientes posts. Este modelo se basa en Transformers para la extracción de características de nuestros datos. Gracias al uso de una primera capa de cross-attention con un vector de query aprendido y con dimensiones fijas, podemos proyectar nuestros inputs a la dimensión deseada. Esto nos da dos ventajas: en primer lugar, podemos usar inputs mucho más grandes que con Transformers tradicionales. Por otro lado, podemos usar inputs multi-modales. En este post hemos visto un ejemplo para clasificación de imagen con el dataset CIFAR10. A diferencia de otras arquitecturas de transformers, como ViT, Perceiver es capaz de atender a todos los pixels de la imagen sin necesitar extraer y proyectar patches.
Recursos
- Paper
- Blog DeepMind.
- Videos:
- Código:
- Implementación original de DeepMind (JAX)
- Pytorch: lucidrains, esceptico