septiembre 30, 2021
~ 70 MIN
Physics Based Deep Learning - Introducción
< Blog RSS![]()
Physics-Based Deep Learning
Introducción
Este es el primero en una serie de posts en los que aprenderemos sobre PBDL: Physics-Based Deep Learning, o el uso del Deep Learning (redes neuronales) para simulación física. En concreto, nos centraremos en CFD: Computational Fluid Dynamics, el campo de la física que se enfoca en la simulación de fluidos para aplicaciones de aerodinámica, combustión, etc. Te advierto que nos vamos a alejar del machine learning tradicional para explorar un nuevo campo, el del uso de las redes neuronales para aproximar soluciones a ecuaciones diferenciales. Es posible que en algunos momentos te preguntes: ¿es esto realmente machine learning? Te entiendo. Aún así, creo firmemente que el campo del PBDL revolucionará la manera en la que simulamos la naturaleza en los próximos años, de la misma manera que el Deep Learning ha revolucionado (y lo sigue haciendo) tantos otros campos de la ciencia, como por ejemplo el plegado de proteinas.
El campo del PBDL es una disciplina relativamente nueva e inexplorada que se basa el uso de redes neuronales para sustituir (o complementar) métodos numéricos "tradicionales" utilizados desde hace años para simular los diferentes procesos físicos que rigen nuestra naturaleza (desde el comportamiento de nuestra atmósfera hasta el movimiento de estrellas y galaxias). Estos procesos pueden ser descritos, en la mayoría de ocasiones, mediante ecuaciones matemáticas. Resolver estas ecuaciones nos permite calcular, por ejemplo, la distribución de presión sobre una superficie aerodinámica (lo cual es muy útil a la hora de diseñar aviones más eficientes, entre muchas otras aplicaciones). Sin embargo, como te podrás imaginar, estas ecuaciones suelen ser muy difíciles de resolver y, en la mayoría de situaciones, ni siquiera pueden ser resueltas de manera analítica. Es aquí donde entran en juego los métodos numéricos, técnicas que nos permiten aproximar soluciones a estas ecuaciones que si bien no son exactas son lo suficientemente precisas para su uso en aplicaciones reales. Tradicionalmente, métodos numéricos de este estilo requieren de grandes recursos computacionales (es por este motivo que tenemos "superordenadores"). Por lo que cualquier avance en el campo que nos permita encontrar soluciones más rápidas y baratas supone una revolución. Creo que el campo del PBDL será la siguiente revolución en este campo. De hecho, este fue el motivo por el que me adentré en el mundo del Deep Learning, persiguiendo la idea de que usar redes neuronales para aproximar soluciones a ecuaciones diferenciales podía ser una buena idea.
Recientemente se ha publicado este libro sobre PBDL. No dudes en consultarlo para aprender más !
Computational Fluid Dynamics
Dentro del gran abanico de aplicaciones de la física computacional, la mecánica de fluidos computacional se encarga del estudio del comportamiento de fluidos, principalmente mediante la resolución de las ecuaciones de Navier-Stokes. Esto tiene un uso muy importante en el diseño de aeronaves, coches (muy importante en coches eléctricos), previsión meteorológica y análisis de la evolución de contaminantes, etc.

Como ya he comentado anteriormente, resolver estas ecuaciones de manera analítica es imposible y su resolución numérica require de grandes recursos computacionales. Aún así, cada vez es más extendido su uso. En el caso del sector aeronáutico la alternativa es el uso de túneles de viento, lo cual es todavía más caro y lento. Poder diseñar vehículos con software de diseño 3d por ordenador, simular su comportamiento en varias condiciones e iterar su diseño hasta encontrar la geometría óptima en entornos virtuales es una gran ventaja. Creo que el uso del Deep Learning para CFD supondrá una revolución y acelerará, a la vez que abaratará, todo este proceso dando como resultado vehículos más eficientes, que viajen más rápido consumiendo y contaminando menos.
Si quieres aprender más sobre CFD te recomiendo echarle un vistazo a mi tesis doctoral 🤗
Leyes de Conservación
Iniciamos nuestro viaje en el campo del PBDL viendo el primer ejemplo de ecuación diferencial que vamos a resolver, primero con métodos numéricos tradicionales y luego con redes neuronales. Nuestro objetivo final es el de resolver las ecuaciones de Navier-Stokes, las cuales se agrupan dentro de las leyes de conservación. Una ley de conservación explica la evolución en el tiempo, , y el espacio, , de una variable conservativa. Un ejemplo muy simple es la evolución de la masa, , de un fluido en un dominio unidimensional.
En este caso, la magnitud conservativa es la densidad, . Asumiendo que ni se crea ni se destruye masa, su evolución, , se deberá únicamente a la cantidad de fluido que esté entrando y saliendo el dominio a través de la entrada, en , y la salida, en (lo que llamamos el flujo, ).
De conocer la velocidad del fluido, podríamos calcular estos flujos como .
Manipulando esta ecuación podemos derivar la siguiente ecuación diferencial
Que, reordenando, quedaría como
Y, debido a que esta integral tiene que ser cero para todos los valores de y
Esta es la formulación básica de la ecuación de conservación de la masa. La forma general para una variable conservativa cualquiera se podría escribir como
O, de manera más compacta, simplemente
Métodos de Volúmenes Finitos
Existen multitud de métodos numéricos para resolver ecuaciones diferenciales (diferencias finitas, elementos finitos, métodos de Galerkin, ...). Para la resolución de ecuaciones de conservación, lo que nos interesa a nosotros, el uso de métodos de volúmenes finitos es el más extendido debido a sus propiedades favorables.
Este método está basado en la discretización del dominio de interés en el que queremos resolver nuestra ecuación en una serie de celdas en las cuales representaremos nuestra solución de manera promediada.
Y para satisfacer la ecuación diferencial se debe cumplir que
Lo cual requerirá el cálculo del flujo .
La ecuación de convección 1D
Vamos a ver nuestro primer ejemplo de ecuación diferencial: la ecuación de convección 1D.
En este caso, la variable conservativa es y el flujo es donde es la velocidad, un valor escalar constante. Esta ecuación es muy útil por varios motivos. En primer lugar, considerando condiciones de contorno periódicas, tiene solución analítica
donde es la condición inicial. A grandes rasgos, la condición inicial se propagará en a la velocidad . Esto convierte a la ecuación de convección 1D como un perfecto benchmark para probar diferentes métodos numéricos.
import numpy as np
import math
import matplotlib.pyplot as plt
x = np.linspace(0,1,100)
p = np.sin(2*math.pi*x)
plt.figure(dpi=100)
plt.plot(x, p)
plt.grid(True)
plt.xlabel('x')
plt.ylabel('$\phi_0$')
plt.show()
from matplotlib import animation, rc
rc('animation', html='html5')
def update(i):
ax.clear()
ax.plot(x, ps[i], "b")
ax.set_xlabel('x')
ax.set_ylabel('$\phi$')
ax.set_title(f't = {ts[i]:.3f}')
ax.grid(True)
return ax
def compute_sol(x, u, t):
return np.sin(2*math.pi*(x - u*t))
u = 1
ts = np.linspace(0,1,50)
ps = []
for t in ts:
p = compute_sol(x, u, t)
ps.append(p)
fig = plt.figure(dpi=100)
ax = plt.subplot(1,1,1)
anim = animation.FuncAnimation(fig, update, frames=len(ps), interval=200)
plt.close()
anim
Resolución con métodos de volúmenes finitos
Lo primero que necesitamos para resolver la ecuación es discretizar nuestro dominio en un conjunto de celdas.
L, N, u = 1., 10, 1.
dx, dt = L / N, (L / N) / u
f = np.linspace(0,L,N+1) # caras
c = np.linspace(0.5*dx,L-0.5*dx,N) # celdas
plt.figure(figsize=(10,1))
plt.plot(f, np.zeros(N+1), '.k')
plt.plot(c, np.zeros(N), '+r')
plt.grid(True)
plt.xlabel('x')
plt.show()

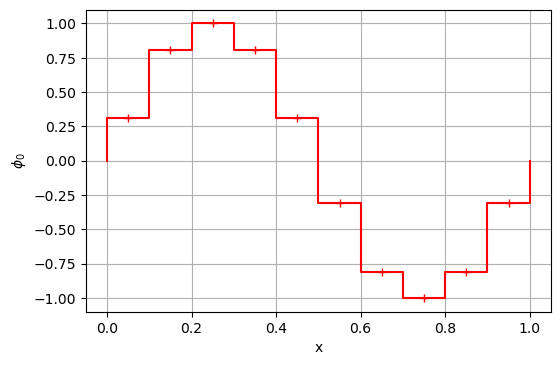
Ahora, nuestra condición inicial estará definida en cada celda como el valor en su centroide (técnicamente deberíamos calcular su integral volumétrica, pero esto no es necesario para nuestro objetivo).
p0 = np.sin(2*math.pi*c)
plt.figure(dpi=100)
plt.plot(c, p0, '+r')
a, b = [0], [0]
for i in range(N):
a += [c[i] - 0.5*dx, c[i], c[i] + 0.5*dx]
b += [p0[i], p0[i], p0[i]]
a += [1]
b += [0]
plt.plot(a, b, '-r')
plt.grid(True)
plt.xlabel('x')
plt.ylabel('$\phi_0$')
plt.show()
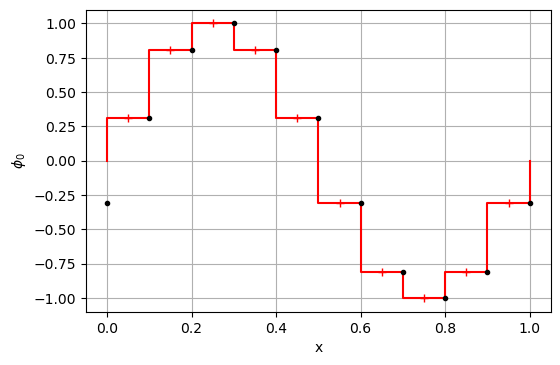
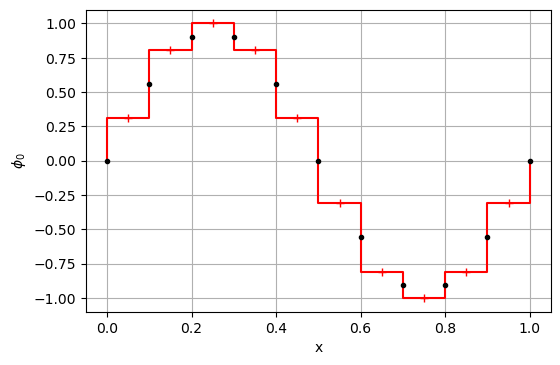
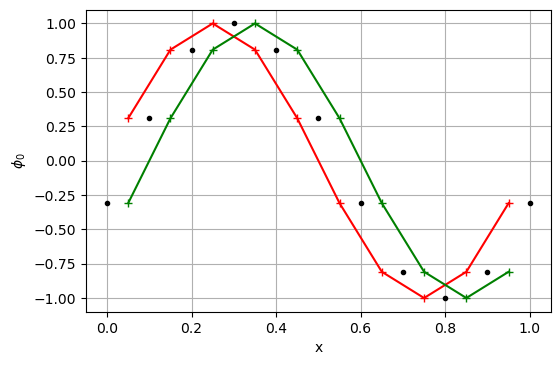
Como hemos visto antes, para calcular la evolución temporal de la variable conservativa necesitamos calcular su flujo a través de sus caras. Existen múltiples esquemas numéricos para aproximar el valor de la variable conservativa en la cara. Un par de esquemas simples son los conocidos como upwind (UDS), que usa el valor aguas arriba, y central (CDS) que usa el valor medio entre los valores a cada lado de la cara.
import numpy as np
def compute_flux(p, u, scheme='uds'):
N = len(p)
f = np.ones(N+1)
for i in range(N+1):
l, r = i-1, i
if i == 0:
l = N - 1
elif i == N:
r = 0
if scheme == 'uds':
f[i] = p[l] if u > 0 else p[r]
elif scheme == 'cds':
f[i] = 0.5*(p[l] + p[r])
else:
raise 'invalid scheme'
return f
pf = compute_flux(p0, u, 'uds')
plt.figure(dpi=100)
plt.plot(c, p0, '+r')
plt.plot(a, b, '-r')
plt.plot(f, pf, '.k')
plt.grid(True)
plt.xlabel('x')
plt.ylabel('$\phi_0$')
plt.show()
pf = compute_flux(p0, u, 'cds')
plt.figure(dpi=100)
plt.plot(c, p0, '+r')
plt.plot(a, b, '-r')
plt.plot(f, pf, '.k')
plt.grid(True)
plt.xlabel('x')
plt.ylabel('$\phi_0$')
plt.show()
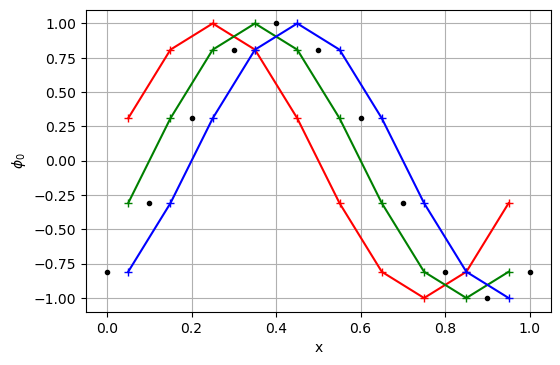
Para cada celda, calcularemos la variación de la magnitud conservativa como la cantidad que sale por la cara de la derecha menos la que entra por la cara izquierda (teniendo en cuenta el signo).
def sum_fluxes(pf):
N = len(pf) - 1
r = np.zeros(N)
for i in range(N):
r[i] = pf[i] - pf[i+1]
return r
Por último, podemos actualizar el resultado usando un esquema de integración temporal, en este caso aplicamos un esquema sencillo de primer orden.
def update_p(p0, r, dt, dx):
N = len(p0)
p = np.zeros(N)
for i in range(N):
p[i] = p0[i] + (dt/dx)*r[i]
return p
p0 = np.sin(2*math.pi*c)
pf = compute_flux(p0, u)
r = sum_fluxes(pf)
p = update_p(p0, r, dt, dx)
plt.figure(dpi=100)
plt.plot(c, p0, '+-r')
plt.plot(f, pf, '.k')
plt.plot(c, p, '+-g')
plt.grid(True)
plt.xlabel('x')
plt.ylabel('$\phi_0$')
plt.show()
pf = compute_flux(p, u)
r = sum_fluxes(pf)
p1 = update_p(p, r, dt, dx)
plt.figure(dpi=100)
plt.plot(c, p0, '+-r')
plt.plot(f, pf, '.k')
plt.plot(c, p, '+-g')
plt.plot(c, p1, '+-b')
plt.grid(True)
plt.xlabel('x')
plt.ylabel('$\phi_0$')
plt.show()
def run_sim(cfl = 1., scheme='uds'):
p0 = np.sin(2*math.pi*c)
ps = [p0]
pa = [p0]
ts = [0]
t = 0
dt = cfl * (L / N) / u
while t + dt < 1.:
t += dt
pf = compute_flux(p0, u, scheme)
r = sum_fluxes(pf)
p = update_p(p0, r, dt, dx)
ps.append(p)
pa.append(compute_sol(c, u, t))
ts.append(t)
p0 = p.copy()
return ps, pa, ts
def update(i):
ax.clear()
ax.plot(c, pa[i], "-b")
ax.plot(c, ps[i], "+-r")
ax.set_xlabel('x')
ax.set_ylabel('$\phi$')
ax.set_title(f't = {ts[i]:.3f}')
ax.grid(True)
ax.set_ylim(-1.1,1.1)
return ax
ps, pa, ts = run_sim()
fig = plt.figure(dpi=100)
ax = plt.subplot(1,1,1)
anim = animation.FuncAnimation(fig, update, frames=len(ps), interval=200)
plt.close()
anim
En este caso particular, resolver la ecuación de convección con un esquema UDS en una malla regular con un incremento temporal y velocidad constante es equivalente a la solución analítica. Esto es debido a que, bajo estas condiciones especiales, el flujo calculado es exacto. Esto, sin embargo, nunca será el caso ya que trabajaremos con mallas irregulares, la velocidad del fluido será variables, etc. En estos casos, el uso de un esquema UDS resulta en una solución artificalmente viscosa.
ps, pa, ts = run_sim(cfl=0.5)
fig = plt.figure(dpi=100)
ax = plt.subplot(1,1,1)
anim = animation.FuncAnimation(fig, update, frames=len(ps), interval=200)
plt.close()
anim
El esquema CDS, por otro lado, acumulará errores debido a la aproximación que resultan en la divergencia de la simulación.
ps, pa, ts = run_sim(cfl=0.5, scheme="cds")
fig = plt.figure(dpi=100)
ax = plt.subplot(1,1,1)
anim = animation.FuncAnimation(fig, update, frames=len(ps), interval=200)
plt.close()
anim
Para aliviar estos problemas se suele recurrir a esquemas numéricos de alto nivel (como por ejemplo los esquemas Runge Kutta para la integración temporal), el uso de mallas muy densas y saltos temporales muy pequeños con el objetivo de reducir al mínimo los errores de aproximación. Este es el principal motivo por el que resolver ecuaciones diferenciales con métodos numéricos suele requerir de grandes requisitos computacionales. La pregunta ahora es: ¿podemos mejorar esto con redes neuronales? La respuesta es ¡SÍ!
PINNs
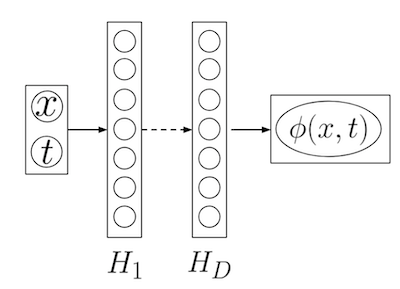
El campo del PBDL abarca diferentes métodos. Vamos a empezar introduciendo el uso de PINNs, o Physics informed Neural Networks. En este caso, usaremos redes neuronales para aproximar la solución a ecuaciones diferenciales usando la misma ecuación como objetivo de aprendizaje (función de pérdida). Así pues, nuestra red neuronal recibirá a la entrada un conjunto de valores de las variables independientes, en nuestro ejemplo y , y nos dará a la salida el valor de la variable conservativa, (la cual deberá satisfacer la ecuación diferencial).
import torch
import torch.nn as nn
# PRO TIP: usar `sin` como función de activación :)
class Sine(nn.Module):
def __init__(self):
super().__init__()
def forward(self, x):
return torch.sin(x)
mlp = nn.Sequential(
nn.Linear(2, 100),
Sine(),
nn.Linear(100, 100),
Sine(),
nn.Linear(100, 1)
)
N_STEPS = 5000
N_SAMPLES = 200
N_SAMPLES_0 = 100
optimizer = torch.optim.Adam(mlp.parameters())
criterion = torch.nn.MSELoss()
log_each = 500
mlp.train()
u = 1.
for step in range(1, N_STEPS+1):
# optimize for PDE
X = torch.rand((N_SAMPLES, 2), requires_grad=True) # N, (X, T)
y_hat = mlp(X) # N, P
grads, = torch.autograd.grad(y_hat, X, grad_outputs=y_hat.data.new(y_hat.shape).fill_(1), create_graph=True, only_inputs=True)
dpdx, dpdt = grads[:,0], grads[:,1]
pde_loss = criterion(dpdt, - u*dpdx)
# optimize for initial condition
x = torch.rand(N_SAMPLES_0)
p0 = torch.sin(2.*math.pi*x / L).unsqueeze(1)
X = torch.stack([ # N0, (X, T = 0)
x,
torch.zeros(N_SAMPLES_0)
], axis=-1)
y_hat = mlp(X) # N, P0
ini_loss = criterion(y_hat, p0)
# optimize for boundary conditions
t = torch.rand(N_SAMPLES_0)
X0 = torch.stack([
torch.zeros(N_SAMPLES_0),
t
], axis=-1)
y_0 = mlp(X0)
X1 = torch.stack([
torch.ones(N_SAMPLES_0),
t
], axis=-1)
y_1 = mlp(X1)
bound_loss = criterion(y_0, y_1)
# update
optimizer.zero_grad()
loss = pde_loss + ini_loss + bound_loss
loss.backward()
optimizer.step()
if step % log_each == 0:
print(f'{step}/{N_STEPS} pde_loss {pde_loss.item():.5f} ini_loss {ini_loss.item():.5f} bound_loss {bound_loss.item():.5f}')
500/5000 pde_loss 0.00213 ini_loss 0.00956 bound_loss 0.00287
1000/5000 pde_loss 0.00027 ini_loss 0.00034 bound_loss 0.00126
1500/5000 pde_loss 0.00027 ini_loss 0.00021 bound_loss 0.00076
2000/5000 pde_loss 0.00024 ini_loss 0.00018 bound_loss 0.00050
2500/5000 pde_loss 0.00018 ini_loss 0.00018 bound_loss 0.00044
3000/5000 pde_loss 0.00014 ini_loss 0.00008 bound_loss 0.00037
3500/5000 pde_loss 0.00017 ini_loss 0.00004 bound_loss 0.00010
4000/5000 pde_loss 0.00006 ini_loss 0.00001 bound_loss 0.00002
4500/5000 pde_loss 0.00006 ini_loss 0.00001 bound_loss 0.00001
5000/5000 pde_loss 0.00005 ini_loss 0.00001 bound_loss 0.00001
def run_mlp(N, dt):
ps, pa, ts = [], [], []
t = 0
L = 1.
dx = L / N
c = np.linspace(0.5*dx,L-0.5*dx,N) # celdas
c_t = torch.from_numpy(c).float()
mlp.eval()
while t < 1.:
with torch.no_grad():
X = torch.stack([ # N0, (X, T = 0)
c_t,
torch.ones(len(c_t))*t
], axis=-1)
p = mlp(X)
ps.append(p.numpy().ravel())
pa.append(compute_sol(c, u, t))
ts.append(t)
t += dt
return ps, pa, ts, c
ps, pa, ts, c = run_mlp(10, 0.05)
fig = plt.figure(dpi=100)
ax = plt.subplot(1,1,1)
anim = animation.FuncAnimation(fig, update, frames=len(ps), interval=200)
plt.close()
anim
Obtenemos una solución muy precisa sin tener en cuenta ningún tipo de aspecto físico ni limitaciones en la discretización. Además, al tratarse de una red neuronal, podemos incluir los parámteros como inputs obteniendo así una aproximación a no solo un caso particular sino todo un abanico de soluciones que nos pueden ayudar a optimizar de manera muy rápida.
mlp = nn.Sequential(
nn.Linear(3, 100), # x, t, u
Sine(),
nn.Linear(100, 100),
Sine(),
nn.Linear(100, 1)
)
N_STEPS = 10000
N_SAMPLES = 200
N_SAMPLES_0 = 100
optimizer = torch.optim.Adam(mlp.parameters())
criterion = torch.nn.MSELoss()
log_each = 1000
mlp.train()
for step in range(1, N_STEPS+1):
# optimize for PDE
u = torch.rand(N_SAMPLES)
X = torch.stack([ # N, (X, T, U)
torch.rand(N_SAMPLES),
torch.rand(N_SAMPLES),
u
], axis=-1)
X.requires_grad = True
y_hat = mlp(X) # N, P
grads, = torch.autograd.grad(y_hat, X, grad_outputs=y_hat.data.new(y_hat.shape).fill_(1), create_graph=True, only_inputs=True)
dpdx, dpdt = grads[:,0], grads[:,1]
pde_loss = criterion(dpdt, - u*dpdx)
# optimize for initial condition
x = torch.rand(N_SAMPLES_0)
X = torch.stack([ # N0, (X, T = 0, U)
x,
torch.zeros(N_SAMPLES_0),
torch.rand(N_SAMPLES_0)
], axis=-1)
y_hat = mlp(X) # N, P0
p0 = torch.sin(2.*math.pi*x / L).unsqueeze(1)
ini_loss = criterion(y_hat, p0)
# optimize for boundary conditions
t = torch.rand(N_SAMPLES_0)
u = torch.rand(N_SAMPLES_0)
X0 = torch.stack([
torch.zeros(N_SAMPLES_0),
t,
u
], axis=-1)
y_0 = mlp(X0)
X1 = torch.stack([
torch.ones(N_SAMPLES_0),
t,
u
], axis=-1)
y_1 = mlp(X1)
bound_loss = criterion(y_0, y_1)
# update
optimizer.zero_grad()
loss = pde_loss + ini_loss + bound_loss
loss.backward()
optimizer.step()
if step % log_each == 0:
print(f'{step}/{N_STEPS} pde_loss {pde_loss.item():.5f} ini_loss {ini_loss.item():.5f} bound_loss {bound_loss.item():.5f}')
1000/10000 pde_loss 0.02887 ini_loss 0.01575 bound_loss 0.01312
2000/10000 pde_loss 0.00375 ini_loss 0.00087 bound_loss 0.00042
3000/10000 pde_loss 0.00123 ini_loss 0.00024 bound_loss 0.00009
4000/10000 pde_loss 0.00068 ini_loss 0.00015 bound_loss 0.00009
5000/10000 pde_loss 0.00037 ini_loss 0.00008 bound_loss 0.00008
6000/10000 pde_loss 0.00044 ini_loss 0.00009 bound_loss 0.00007
7000/10000 pde_loss 0.00031 ini_loss 0.00006 bound_loss 0.00004
8000/10000 pde_loss 0.00021 ini_loss 0.00005 bound_loss 0.00008
9000/10000 pde_loss 0.00020 ini_loss 0.00005 bound_loss 0.00007
10000/10000 pde_loss 0.00014 ini_loss 0.00002 bound_loss 0.00004
def run_mlp2(N, dt, u):
ps, pa, ts = [], [], []
t = 0
L = 1.
dx = L / N
c = np.linspace(0.5*dx,L-0.5*dx,N) # celdas
c_t = torch.from_numpy(c).float()
mlp.eval()
while t < 1.:
with torch.no_grad():
X = torch.stack([ # N0, (X, T = 0)
c_t,
torch.ones(len(c_t))*t,
torch.ones(len(c))*u
], axis=-1)
p = mlp(X)
ps.append(p.numpy().ravel())
pa.append(compute_sol(c, u, t))
ts.append(t)
t += dt
return ps, pa, ts, c
ps, pa, ts, c = run_mlp2(10, 0.01231, 0.680981726)
fig = plt.figure(dpi=100)
ax = plt.subplot(1,1,1)
anim = animation.FuncAnimation(fig, update, frames=len(ps), interval=200)
plt.close()
anim
Voilà, tenemos una red neuronal que es capaz de darnos una solución muy buena a la ecuación de convección 1D. Esta solución es contínua y derivable, a diferencia de la solución numérica. Además, nos da resultados para cualquier valor de usado durante el entrenamiento (podríamos añadir más parámetros en los inputs si quisiésemos).
Resumen
En este primer post sobre PBDL hemos introducido los conceptos básicos que vamos a desarrollar en los próximos posts. Nuestro objetivo será el de resolver ecuaciones diferenciales usando redes neuronales en vez de métodos numéricos tradicionales, con las ventajas y desventajas que ello conlleva. Hemos visto un primer ejemplo de resolución de la ecuación de convección 1D, usando volúmenes finitos y PINNs. Con el método de volúmenes finitos, necesitamos discretizar nuestro dominio en un conjunto de celdas en las que resolveremos la ecucación. Para ello tenemos que calcular los flujos en las caras de las celdas y usar un esquema de integración temporal. En función de los esquemas numéricos elegidos (tanto espaciales como temporales) nuestra solución se comportará de una manera u otra (echibiendo difusión artificial u oscilaciones que pueden hacer diverger nuestra simulación). Además, tenemos fuertes restricciones a nivel físico que dan como resultado la necesidad de mallas muy densas y saltos temorales pequeños para minimizar los errores. Por otro lado, el uso de PINNs no tienen ningún tipo de restricción y nos dan como resultado soluciones precisas, continuas y derivables. Además, al poder añadir los parámetros libreas como entradas a la red, podemos obtener soluciones para un rango de escenarios que podemos usar para estudios de optimización de manera muy eficiente. En futuros posts seguiremos explorando este nuevo y apasionante campo.