octubre 21, 2021
~ 5 MIN
PBDL - Navier Stokes
< Blog RSS![]()
Navier Stokes
En este post vamos a resolver las ecuaciones de Navier Stokes (incompresibles) en el problema conocido como Driven Cavity. En él, tendremos que calcular la evolución de un fluido confinado en un dominio cuadrado en el que uno de los lados se mueve.
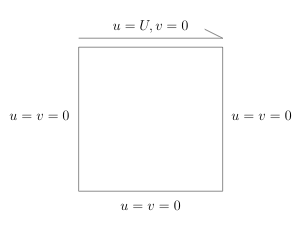
En este caso, controlaremos la viscosidad del fluido mediante el número de Reynolds, . Cuanto mayor sea su valor, menor viscosidad tendrá (con todo lo que ello conlleva, principalmente mayor turbulencia e inestabilidades).
import torch
import torch.nn as nn
class Sine(nn.Module):
def __init__(self):
super().__init__()
def forward(self, x):
return torch.sin(x)
mlp = nn.Sequential(
nn.Linear(2, 100),
Sine(),
nn.Linear(100, 100),
Sine(),
nn.Linear(100, 100),
Sine(),
nn.Linear(100, 3)
)
device = "cuda"
mlp.to(device)
Sequential(
(0): Linear(in_features=2, out_features=100, bias=True)
(1): Sine()
(2): Linear(in_features=100, out_features=100, bias=True)
(3): Sine()
(4): Linear(in_features=100, out_features=100, bias=True)
(5): Sine()
(6): Linear(in_features=100, out_features=3, bias=True)
)
def computeGrads(y, x):
grads, = torch.autograd.grad(y, x, grad_outputs=y.data.new(y.shape).fill_(1), create_graph=True, only_inputs=True)
return grads
from fastprogress.fastprogress import progress_bar
N_STEPS = 100000
N_SAMPLES = 1000
N_SAMPLES_0 = 1000
optimizer = torch.optim.Adam(mlp.parameters())
scheduler = torch.optim.lr_scheduler.MultiStepLR(optimizer, milestones=[int(0.4*N_STEPS), int(0.8*N_STEPS)], gamma=0.1)
criterion = torch.nn.MSELoss()
mlp.train()
Re = 100
mlp.to(device)
mb = progress_bar(range(1, N_STEPS+1))
for step in mb:
# optimize for PDE
x = torch.rand(N_SAMPLES, device=device)
y = torch.rand(N_SAMPLES, device=device)
X = torch.stack([
x,
y,
], axis=-1)
X.requires_grad = True
y_hat = mlp(X)
u, v, p = y_hat[:,0], y_hat[:,1], y_hat[:,2]
grads = computeGrads(u, X)
dudx, dudy = grads[:, 0], grads[:, 1]
grads = computeGrads(v, X)
dvdx, dvdy = grads[:, 0], grads[:, 1]
grads = computeGrads(p, X)
dpdx, dpdy = grads[:, 0], grads[:, 1]
du2dx2 = computeGrads(dudx, X)[:, 0]
du2dy2 = computeGrads(dudy, X)[:, 1]
dv2dx2 = computeGrads(dvdx, X)[:, 0]
dv2dy2 = computeGrads(dvdy, X)[:, 1]
pde_loss = criterion(dudx, - dvdy) + \
criterion(u*dudx + v*dudy + dpdx, (1./Re)*(du2dx2 + du2dy2)) + \
criterion(u*dvdx + v*dvdy + dpdy, (1./Re)*(dv2dx2 + dv2dy2))
# optimize for boundary conditions
# left
y = torch.rand(N_SAMPLES_0, device=device)
Y0 = torch.stack([
torch.zeros(N_SAMPLES_0, device=device),
y,
], axis=-1)
Y0.requires_grad = True
p_y0 = torch.stack([
torch.zeros(N_SAMPLES_0, device=device),
torch.zeros(N_SAMPLES_0, device=device),
], axis=-1)
y_y0 = mlp(Y0)
y0_uv_loss = criterion(y_y0[:,:2], p_y0)
p = y_y0[:,2]
dpdx = computeGrads(p, Y0)[:,0]
y0_p_loss = criterion(dpdx, torch.zeros(len(dpdx), device=device))
# right
y = torch.rand(N_SAMPLES_0, device=device)
Y1 = torch.stack([
torch.ones(N_SAMPLES_0, device=device),
y,
], axis=-1)
Y1.requires_grad = True
p_y1 = torch.stack([
torch.zeros(N_SAMPLES_0, device=device),
torch.zeros(N_SAMPLES_0, device=device),
], axis=-1)
y_y1 = mlp(Y1)
y1_uv_loss = criterion(y_y1[:,:2], p_y1)
p = y_y1[:,2]
dpdx = computeGrads(p, Y1)[:,0]
y1_p_loss = criterion(dpdx, torch.zeros(len(dpdx), device=device))
# bot
x = torch.rand(N_SAMPLES_0, device=device)
X0 = torch.stack([
x,
torch.zeros(N_SAMPLES_0, device=device),
], axis=-1)
X0.requires_grad = True
p_x0 = torch.stack([
torch.zeros(N_SAMPLES_0, device=device),
torch.zeros(N_SAMPLES_0, device=device),
], axis=-1)
y_x0 = mlp(X0)
x0_uv_loss = criterion(y_x0[:,:2], p_x0)
p = y_x0[:,2]
dpdy = computeGrads(p, X0)[:,1]
x0_p_loss = criterion(dpdy, torch.zeros(len(dpdy), device=device))
# top
x = torch.rand(N_SAMPLES_0, device=device)
X1 = torch.stack([
x,
torch.ones(N_SAMPLES_0, device=device),
], axis=-1)
X1.requires_grad = True
p_x1 = torch.stack([
torch.ones(N_SAMPLES_0, device=device),
torch.zeros(N_SAMPLES_0, device=device),
], axis=-1)
y_x1 = mlp(X1)
x1_uv_loss = criterion(y_x1[:,:2], p_x1)
p = y_x1[:,2]
dpdy = computeGrads(p, X1)[:,1]
x1_p_loss = criterion(dpdy, torch.zeros(len(dpdy), device=device))
bound_loss = y0_uv_loss + y0_p_loss + \
x1_uv_loss + x1_p_loss + \
x0_uv_loss + x0_p_loss + \
y1_uv_loss + y1_p_loss
# update
optimizer.zero_grad()
loss = 10.*bound_loss + pde_loss
loss.backward()
optimizer.step()
scheduler.step()
mb.comment = f'pde_loss {pde_loss.item():.5f} bound_loss {bound_loss.item():.5f}'
import numpy as np
def run_mlp(Nx, Ny):
x = np.linspace(0,1,Nx)
y = np.linspace(0,1,Ny)
X = np.stack(np.meshgrid(x,y), -1).reshape(-1, 2)
X = torch.from_numpy(X).float()
mlp.eval()
mlp.cpu()
with torch.no_grad():
p = mlp(X)
return p[:,0].reshape(Ny,Nx), p[:,1].reshape(Ny,Nx), p[:,2].reshape(Ny,Nx), x, y
Nx, Ny = 100, 100
u, v, p, x, y = run_mlp(Nx, Ny)
import matplotlib.pyplot as plt
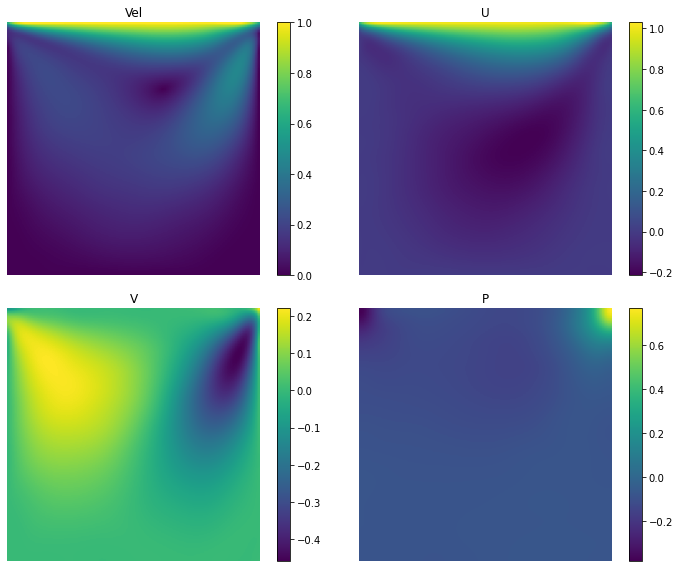
# plot results
fig, ((ax1, ax2), (ax3, ax4)) = plt.subplots(2, 2, figsize=(10,8))
vel = np.sqrt(u**2 + v**2)
im=ax1.imshow(vel, vmin=0, vmax=1, origin='lower', extent=[x.min(), x.max(), y.min(), y.max()])
fig.colorbar(im, ax=ax1)
ax1.set_xlabel("x", fontsize=14)
ax1.set_ylabel("y", fontsize=14, rotation=np.pi/2)
ax1.set_title("Vel")
ax1.axis(False)
im=ax2.imshow(u, vmin=u.min(), vmax=u.max(), origin='lower', extent=[x.min(), x.max(), y.min(), y.max()])
fig.colorbar(im, ax=ax2)
ax2.set_title("U")
im=ax3.imshow(v, vmin=v.min(), vmax=v.max(), origin='lower', extent=[x.min(), x.max(), y.min(), y.max()])
fig.colorbar(im, ax=ax3)
ax2.axis(False)
ax3.axis(False)
ax3.set_title("V")
im=ax4.imshow(p, vmin=p.min(), vmax=p.max(), origin='lower', extent=[x.min(), x.max(), y.min(), y.max()])
fig.colorbar(im, ax=ax4)
ax4.axis(False)
ax4.set_title("P")
plt.tight_layout()
plt.show()
import pandas as pd
# profiles
mid_u = u[:,len(u)//2]
mid_v = v[len(v)//2,:]
exp_u = pd.read_csv('dc_100_ux.csv', header=None).values
exp_v= pd.read_csv('dc_100_uy.csv', header=None).values
fig = plt.figure(figsize=(15,5))
ax1 = plt.subplot(121)
ax1.plot(mid_u, y, label="numeric")
ax1.plot(exp_u[:,0], exp_u[:,1], '.k', label="experimental")
ax1.set_xlabel('x')
ax1.set_ylabel('u')
ax1.legend()
ax1.grid(True)
ax2 = plt.subplot(122)
ax2.plot(x,mid_v, label="numeric")
ax2.plot(exp_v[:,0], exp_v[:,1], '.k', label="experimental")
ax2.legend()
ax2.set_xlabel('y')
ax2.set_ylabel('v')
ax2.grid(True)
plt.show()
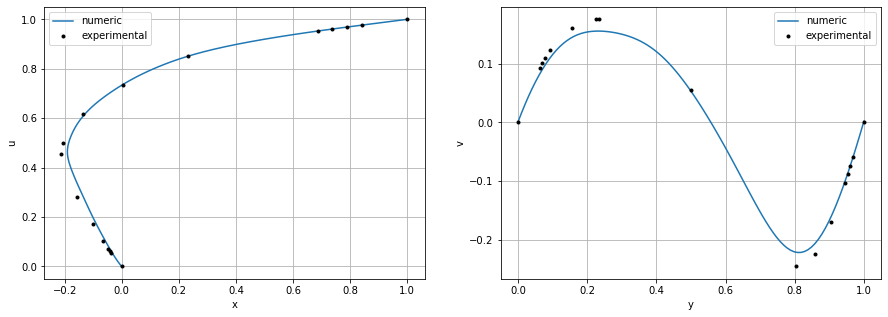
Como puedes ver, resolver las ecuaciones de Navier Stokes con redes neuronales no solo es posible sino que el resultado es bastante bueno. Sin embargo, hemos hecho varias suposiciones que pueden limitar su uso.
En primer lugar, hemos considerado una solución estacionaria. Tener en cuenta la dimensión temporal será necesario en casos en los que la turbulencia sea importante (un mayor número de Reynolds). En estos casos, usar redes neuronales en conjunto con métodos tradicionales (para acelerarlos o reducir sus errores) puede ser la combinación ganadora.
En segundo lugar, nuestra solución solo es válida para este caso en concreto. Como ya hemos visto, podríamos añadir los parámetros libres como inputs del modelo, sin embargo seguiriamos limitados a este problema. Este problema puede resolverse de la misma manera que el anterior, teniendo un simulador "tradicional" aumentado con redes neuronales para mejorar su precisión y velocidad.