marzo 17, 2023
~ 24 MIN
Pytorch 2.0
< Blog RSS![]()
Pytorch 2.0
Pytorch 2.0 ya está aquí 🎉🎉🎉 Tras varios meses en fase beta, la segunda versión de nuestro framework favorito de deep learning ya está disponible. Si ya sabes trabajar con Pytorch, este post te servirá para refrescar algunos conocimientos básicos a la vez que aprenderás sobre las novedades de Pytorch 2.0. Por otro lado, si no sabes nada de Pytorch, este post te servirá como introducción para aprender a usarlo desde cero.
En mi canal de Yotube tengo una lista de reproducción con todos los vídeos que he grabado sobre Pytorch. Te recomiendo que le eches un vistazo si quieres aprender más sobre este framework.
¿Qué es Pytorch?
Pytorch es un framework de redes neuronales, un conjunto de librerías y herramientas que nos hacen la vida más fácil a la hora de diseñar, entrenar y poner en producción nuestros modelos de Deep Learning. Una forma sencilla de entender qué es Pytorch es la siguiente:
Quizás la característica más relevante de Pytorch es su facilidad de uso. Esto es debido a que sigue una interfaz muy similar a la de NumPy, por lo que si estás familiarizado con esta librería no debería costarte mucho usar Pytorch 😁.
Si no conces
Numpyte recomiendo que le eches un vistazo a este post.
Sin embargo, la funcionalidad más importante que Pytorch ofrece es la conocidad como autograd, la cual nos proporciona la posibilidad de calcular derivadas de manera automática con respecto a cualquier tensor. Esto le da a Pytorch un gran potencial para diseñar redes neuronales complejas y entrenarlas utilizando algoritmos de descenso por gradiente sin tener que calcular todas estas derivadas manualmente. Para poder llevar a cabo estas operaciones, Pytorch va construyendo de manera dinámica un grafo computacional. Cada vez que aplicamos una operación sobre uno o varios tensores, éstos se añaden al grafo computacional junto a la operación en concreto. De esta manera, si queremos calcular la derivada de cualquier valor con respecto a cualquier tensor, simplemente tenemos que aplicar el algoritmo de backpropagation (que no es más que la regla de la cadena de la derivada) en el grafo.
Para que todo esto funcione de manera eficiente, Pytorch nos d ala posibilidad de ejecutar nuestro códigp en GPUs. Esto es posible gracias a que Pytorch está construido sobre CUDA, una librería de C++ que nos permite programar en GPU. Por lo tanto, si tienes una GPU disponible, Pytorch la utilizará sin prácticamente ningún cambio en tu código para acelerar los cálculos. Si no tienes una GPU, puedes usar servicios como Google Colab o Kaggle para ejecutar tu código en la nube.
Instalación
El primer paso para empezar a trabajar con Pytorch es instalarlo. Para ello, puedes seguir las instrucciones que aparecen en la página oficial. En mi caso, voy a instalarlo usando conda en un ordenador con Linux y con soporte GPU:
conda install pytorch torchvision pytorch-cuda=11.7 -c pytorch -c nvidia
Si no sabes como instalar
PythonoCondaen tu sistema, puedes aprender a hacerlo en este post. También te recomiendo crear un entorno virtual para tu nueva instalación, así evitarás conflictos con otros proyectos que tengas en marcha.
En el momento de escribir este post el comando anterior instalará la versión de Pytorch 2.0, en el momento en el que tu lo hagas instalará la versión más reciente hasta la fecha. Para instalar versiones diferentes vista https://pytorch.org/get-started/previous-versions/.
Una vez instalado ya podrás empezar a trabajar con Pytorch 🎉🎉🎉
import torch
torch.__version__
'2.0.0.dev20230213+cu117'
Para saber si la GPU está disponible, puedes ejecutar
torch.cuda.is_available()
True
El siguiente comando te dará información sobre tu sistema (si no funciona deberás primero instalar los drivers de NVIDIA).
!nvidia-smi
Fri Mar 17 10:09:05 2023
+-----------------------------------------------------------------------------+
| NVIDIA-SMI 525.85.05 Driver Version: 525.85.05 CUDA Version: 12.0 |
|-------------------------------+----------------------+----------------------+
| GPU Name Persistence-M| Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap| Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|===============================+======================+======================|
| 0 NVIDIA GeForce ... Off | 00000000:17:00.0 Off | N/A |
| 0% 55C P0 106W / 350W | 29MiB / 24576MiB | 0% Default |
| | | N/A |
+-------------------------------+----------------------+----------------------+
| 1 NVIDIA GeForce ... Off | 00000000:65:00.0 Off | N/A |
| 0% 56C P8 29W / 350W | 8MiB / 24576MiB | 0% Default |
| | | N/A |
+-------------------------------+----------------------+----------------------+
+-----------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=============================================================================|
| 0 N/A N/A 1378 G /usr/lib/xorg/Xorg 16MiB |
| 0 N/A N/A 1622 G /usr/bin/gnome-shell 8MiB |
| 1 N/A N/A 1378 G /usr/lib/xorg/Xorg 4MiB |
+-----------------------------------------------------------------------------+
Primeros pasos
Como comentabamos antes, Pytorch es muy similar a Numpy. Si bien el objeto principal en Numpy es el array, en Pytorch es el tensor. Un tensor es una matriz multidimensional con un tipo de datos concreto. Por ejemplo, podemos crear un tensor de 2x2 con ceros de la siguiente manera
x = torch.zeros(2, 2)
x
tensor([[0., 0.],
[0., 0.]])
Puedes crear tensores con valores aleatorios
x = torch.randn(3)
x
tensor([-0.2063, 0.7455, -0.0131])
E incluso a partir de una lista de Python
x = torch.tensor([[1, 2, 3],[4, 5, 6]])
x
tensor([[1, 2, 3],
[4, 5, 6]])
U otro array de Numpy
import numpy as np
a = np.array([[1, 2],[4, 5],[5, 6]])
x = torch.from_numpy(a)
x
tensor([[1, 2],
[4, 5],
[5, 6]])
Y como puedes esperar, prácticamente todos los conceptos que ya conocemos para trabajar con NumPy pueden aplicarse en Pytorch. Esto incluye operaciones aritméticas, indexado y troceado, iteración, vectorización y broadcasting.
# operaciones
x = torch.randn(3, 3)
y = torch.randn(3, 3)
x, y
(tensor([[ 1.6784, 1.7195, -0.5614],
[ 1.0342, -0.5727, -0.4840],
[ 0.4360, 1.4932, 0.3966]]),
tensor([[ 1.0446, 0.3586, -0.9713],
[-0.1943, -3.3726, 0.1241],
[ 0.1605, -0.0124, -1.3009]]))
x + y
tensor([[ 2.7230, 2.0781, -1.5328],
[ 0.8399, -3.9453, -0.3599],
[ 0.5965, 1.4808, -0.9044]])
x - y
tensor([[ 0.6338, 1.3609, 0.4099],
[ 1.2285, 2.7999, -0.6082],
[ 0.2755, 1.5055, 1.6975]])
# indexado
# primera fila
x[0]
tensor([ 1.6784, 1.7195, -0.5614])
# primera fila, primera columna
x[0, 0]
tensor(1.6784)
# primera columna
x[0, :]
tensor([ 1.6784, 1.7195, -0.5614])
# troceado
x[:-1, 1:]
tensor([[ 1.7195, -0.5614],
[-0.5727, -0.4840]])
Una funcionalidad importante del objeto tensor que utilizaremos muy a menudo es cambiar su forma. Esto lo conseguimos con la función view.
x.shape
torch.Size([3, 3])
# añadimos una dimensión extra
x.view(1, 3, 3).shape
torch.Size([1, 3, 3])
# estiramos en una sola dimensión
x.view(9).shape
torch.Size([9])
# usamos -1 para asignar todos los valores restantes a una dimensión
x.view(-1).shape
torch.Size([9])
Podemos transformar un tensor en un array con la función numpy.
x.numpy()
array([[ 1.6783874, 1.7194802, -0.5614443],
[ 1.0342228, -0.5727211, -0.484026 ],
[ 0.4360042, 1.4931623, 0.3965516]], dtype=float32)
Para aprender más sobre cómo funcionan estos tensores, puedes cosultar la documentación y este ejemplo
Autograd
Vamos a ver un ejemplo de autograd en acción para el cálculo de derivadas automáticas. Para ello, consideremos el siguiente grafo computacional sencillo:
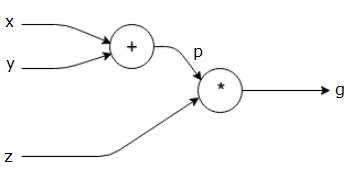
Tenemos tres tensores, , y , los cuales combinamos con diferente operacion para calcular . ¿Cómo podemos encontrar la derivada de con respecto a cada uno de los tensores a la entrada?. Para el caso de esto es sencillo:
En el caso de y es un poco más complicado, ya que tenemos que aplicar la regla de la cadena de la derivada:
Si bien en este ejemplo sencillo lo hemos podido calcular a mano, imagina tener que hacer esto en redes neuronales con miles de millones de parámetros... imposible. Autograd nos permite calcular estas derivadas de manera automática.
x = torch.tensor(1., requires_grad=True)
y = torch.tensor(2., requires_grad=True)
p = x + y
z = torch.tensor(3., requires_grad=True)
g = p * z
Para ello marcaremos los tensores de los cuales queremos calcular derivadas con la función requires_grad. Llamado a la función backwerd sobre el tensor de salida, autograd calculará las derivadas de manera automática y las almacenará en el atributo grad de cada tensor.
g.backward()
z.grad # x + y
tensor(3.)
x.grad # z
tensor(3.)
y.grad # z
tensor(3.)
Como puedes ver, el grafo computacional es una herramienta extraordinaria para diseñar redes neuronales de complejidad arbitraria. Con una simple función, gracias al algoritmo de backpropagation, podemos calcular todas las derivadas de manera sencilla (cada nodo que representa una operación solo necesita calcular su propia derivada de manera local) y optimizar el modelo con nuestro algoritmo de gradiente preferido.
Añadiendo autograd encima de NumPy, Pytorch nos ofrece todo lo que necesitamos para diseñar y entrenar redes neuronales. Puedes aprender más sobre autograd aquí. Sin embargo, si queremos entrenar redes muy grandes o utilizar datasets muy grandes (o ambas), el proceso de entrenamiento será muy lento. Es aquí donde entra en juego el último elemento que hace de Pytorch lo que es.
GPU
La última pieza que nos falta explorar es la posibilidad de ejecutar nuestro código en GPU. Para ello, solo tenemos que crear nuestros tensores en la GPU y ejecutar las operaciones de la misma manera. ¡Super sencillo!
x = torch.randn(3, 3, device="cuda")
y = torch.randn(3, 3, device="cuda")
x * y
tensor([[ 1.0285e-01, -1.0678e-01, -1.7388e-01],
[-4.4772e-01, 2.6374e-01, 2.8962e-01],
[ 3.0987e-01, -2.9449e-01, -4.0236e-04]], device='cuda:0')
Las siguientes son todas formas válidas de crear un tensor en la GPU
device = torch.device("cuda") # device = "cuda" también sirve
x = torch.randn(3, 3, device=device) # crea el tensor en la GPU
x = torch.randn(3, 3)
x = x.to(device) # mueve el tensor a la GPU (menos eficiente)
x = x.cuda() # mueve el tensor a la GPU (menos eficiente)
device = "cuda:0" # selecciona la primera GPU, si hay más de una - "cuda:1", "cuda:2", etc.
x = torch.randn(3, 3, device=device)
x
tensor([[-0.4112, -0.0476, -0.4308],
[-0.2315, -1.1937, 0.0723],
[ 1.5994, -0.0311, 0.1895]], device='cuda:0')
Puedes copiar un tensor de la GPU a la CPU con la función cpu
device = torch.device("cpu")
x = x.cpu()
x = x.to("cpu")
x = x.to(device)
El siguiente ejemplo ilustra porque es importante ejecutar nuestro código en GPU. En este caso, vamos a calcular el tiempo que tarda en ejecutarse la multiplicación de dos matrices grandes.
# en cpu
x = torch.randn(10000,10000)
y = torch.randn(10000,10000)
%time z = x*y
CPU times: user 90.3 ms, sys: 165 ms, total: 256 ms
Wall time: 27.9 ms
# en gpu
x = torch.randn(10000,10000).cuda()
y = torch.randn(10000,10000).cuda()
%time z = x*y
CPU times: user 0 ns, sys: 17.6 ms, total: 17.6 ms
Wall time: 17.6 ms
Redes Neuronales
Pues ahora que ya conocemos los conceptos básicos de Pytorch vamos a ver como podemos diseñar redes neuronales.
Modelos secuenciales
La forma más sencilla de definir una red neuronal en Pytorch es utilizando la clase Sequentail. Esta clase nos permite definir una secuencia de capas, que se aplicarán de manera secuencial (las salidas de una capa serán la entrada de la siguiente). Vamos a definir un Perceptrón Multicapa (MLP).
Puedes aprender más sobre
Perceptrones Multicapaen este post.
D_in, H, D_out = 784, 100, 10
model = torch.nn.Sequential(
torch.nn.Linear(D_in, H),
torch.nn.ReLU(),
torch.nn.Linear(H, D_out),
)
model
Sequential(
(0): Linear(in_features=784, out_features=100, bias=True)
(1): ReLU()
(2): Linear(in_features=100, out_features=10, bias=True)
)
El modelo anterior es un MLP con 784 entradas, una capa oculta de 100 neuronas y 10 salidas. Para ejectuar el modelo, podemos llamarlo como de si una función se tratase, pasando como argumento el tensor con los inputs.
La capa de tipo
Linearespera un tensor de 2 dimensiones, en la cual la primera es la dimensión delbatchque puedes ser arbitraria y la segunda tiene que coincidir con el número de neuronas especificado, en nuestro ejemplo 784 en la primera capa y 100 en la segunda.
outputs = model(torch.randn(64, 784))
outputs.shape
torch.Size([64, 10])
De la misma manera que hemos visto antes con los tensores, podemos enviar nuestro modelo a la GPU para acelerar las operaciones internas.
model.cuda()
x = torch.randn(64, 784).cuda()
outputs = model(x)
outputs.shape, outputs.device
(torch.Size([64, 10]), device(type='cuda', index=0))
Modelos personalizados
Si bien los modelos secuenciales son útiles para definir redes neuronales sencillas, en la práctica casi siempre necesitaremos definir redes más complejas. Para ello, podemos definir nuestras propias clases que hereden de la clase Module de Pytorch. Esta clase nos permite definir modelos de manera más flexible, ya que nos permite diseñar la lógica de ejecución del modelo a nuestro gusto.
class Model(torch.nn.Module):
# constructor
def __init__(self, D_in=784, H=100, D_out=10):
# llamamos al constructor de la clase madre
super(Model, self).__init__()
# definimos nuestras capas
self.fc1 = torch.nn.Linear(D_in, H)
self.relu = torch.nn.ReLU()
self.fc2 = torch.nn.Linear(H, D_out)
# lógica para calcular las salidas de la red
def forward(self, x):
x = self.fc1(x)
x = self.relu(x)
x = self.fc2(x)
return x
En primer lugar, necesitamos definir una nueva clase que herede de la clase torch.nn.Module. Esta clase madre aportará toda la funcionalidad esencial que necesita una red neuronal (soporte GPU, iterar por sus parámeteros, etc). Luego, en esta clase necesitamos definir mínimos dos funciones:
init: en el constructor llamaremos al constructor de la clase madre y después definiremos todas las capas que querramos usar en la red.forward: en esta función definimos toda la lógica que aplicaremos desde que recibimos los inputs hasta que devolvemos los outputs.
En el ejemplo anterior simplemente hemos replicado la misma red (puedes conseguir el mismo efecto usando la clase Sequential).
model = Model(784, 100, 10)
outputs = model(torch.randn(64, 784))
outputs.shape
torch.Size([64, 10])
Compilando modelos
Una de las novedades que Pytorch 2.0 introduce es la posibilidad de compilar el modelo. Esto le permite analizar nuestro modelo para su optimización, consiguiendo así un mejor rendimiento durante el entrenamiento.
model_compiled = torch.compile(model)
Puedes aprender más sobre esta funcionalidad aquí.
Datasets
A la hora de entrenar una red neuronal, necesitamos un conjunto de datos sobre el que entrenar. Para ello, Pytorch nos ofrece funcionalidad para su creación e iteración de manera optimizada. Vamos a ver un ejemplo usando el conjunto de datos MNIST, que podemos descargar usando Scikit-Learn.
from sklearn.datasets import fetch_openml
import numpy as np
mnist = fetch_openml('mnist_784', version=1)
X, Y = mnist["data"].values.astype(float).reshape(-1, 28, 28) / 255., mnist["target"].values.astype(int)
np.savez_compressed("mnist.npz", X=X, y=Y)
# la descarga puede tardar un rato, así que te recomiendo comentar las líneas anteriores después
# de ejecutarlas la primera vez y descomentar las siguientes para cargar los datos desde el disco
# X, Y = np.load("mnist.npz")["X"], np.load("mnist.npz")["y"]
X.shape, Y.shape
((70000, 28, 28), (70000,))
import matplotlib as mpl
import matplotlib.pyplot as plt
import random
r, c = 3, 5
fig = plt.figure(figsize=(2*c, 2*r))
for _r in range(r):
for _c in range(c):
plt.subplot(r, c, _r*c + _c + 1)
ix = random.randint(0, len(X)-1)
plt.imshow(X[ix], cmap='gray')
plt.axis("off")
plt.title(y[ix])
plt.tight_layout()
plt.show()
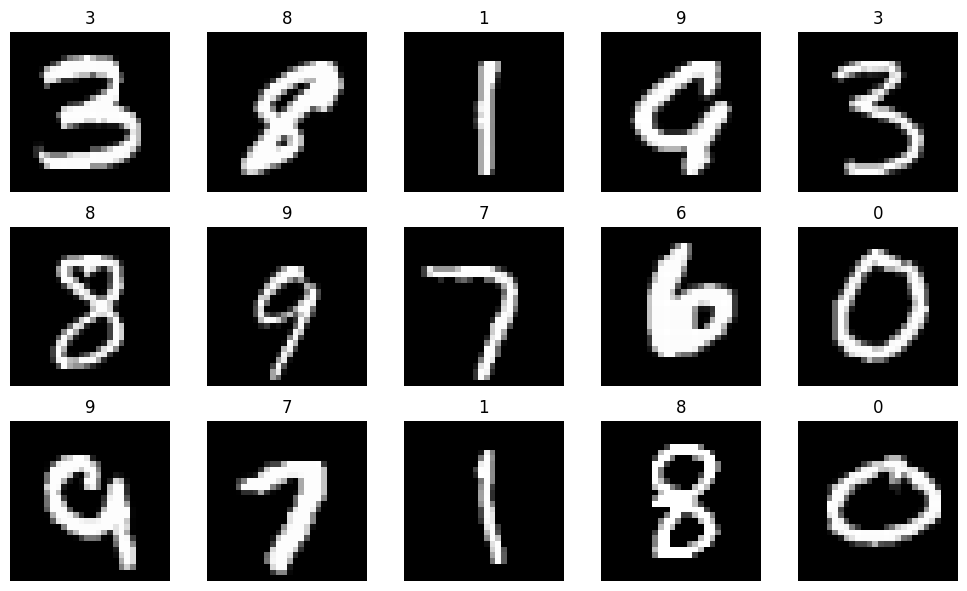
Este dataset consiste en imágenes de dígitos manuscritos (del 0 al 9) con su correspondiente etiqueta, un dataset muy útil para aprender a entrenar redes neuronales, en concreto para clasificación de imágenes.
El DataLoader
El DataLoader es un objeto que nos permite iterar nuestro dataset en batches de manera eficiente. Podemos pasarle como argumento cualquier iterador, desde una lista de Python hasta un array de NumPy o un tensor de Pytorch.
dataloader = torch.utils.data.DataLoader(X, batch_size=100)
for batch in dataloader:
print(batch.shape)
break
torch.Size([100, 28, 28])
Tiene varias opciones interesantes que nos permitirán mejorar la eficiencia de nuestro entrenamiento.
dataloader = torch.utils.data.DataLoader(
X, # datos
batch_size=100, # tamaño del batch, número de imágenes por iteración
shuffle=True, # barajamos los datos antes de cada epoch
num_workers=4, # número de procesos que se lanzan para cargar los datos (número de cores de la CPU para carga en paralelo)
pin_memory=True, # si tenemos una GPU, los datos se cargan en la memoria de la GPU
collate_fn=None, # función para combinar los datos de cada batch
)
El Dataset
Si bien el dataloader es capaz de trabajar con cualquier iterador, Pytorch nos ofrece una clase base para crear nuestros propios datasets
class Dataset(torch.utils.data.Dataset):
# constructor
def __init__(self, X, Y):
self.X = torch.tensor(X).float()
self.Y = torch.tensor(Y).long()
# cantidad de muestras en el dataset
def __len__(self):
return len(self.X)
# devolvemos el elemento `ix` del dataset
def __getitem__(self, ix):
return self.X[ix], self.Y[ix]
# opcionalmente, podemos definir una función para generar un batch
def collate_fn(self, batch):
x, y = [], []
for _x, _y in batch:
x.append(_x)
y.append(_y)
return torch.stack(x).view(len(batch), -1), torch.stack(y) # estiramos las imágenes en una dimensión
Para ello crearemos una nueva clase que hereda de torch.utils.data.Dataset, en la cual definiremos estas tres funciones:
__init__: el constructor__len__: devuelve el número de muestras en el dataset__getitem__: devuelve una muestra en concreto del dataset
Cada vez que nuestro dataloader necesite una nueva muestra, llamará a la función __getitem__ pasándole el índice de la muestra que necesita. Aquí podremos definir cualquier lógica de carga y procesado de datos (por ejemplo, leer imágenes y aplicar transformaciones).
dataset = Dataset(X, Y)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=100)
for batch in dataloader:
x, y = batch
print(x.shape, y.shape)
break
torch.Size([100, 28, 28]) torch.Size([100])
dataloader = torch.utils.data.DataLoader(dataset, batch_size=100, collate_fn=dataset.collate_fn)
for batch in dataloader:
x, y = batch
print(x.shape, y.shape)
break
torch.Size([100, 784]) torch.Size([100])
Entrenamiento
Ha llegado el momento de ver cómo podemos entrenar nuestro modelo con el dataset que hemos creado. Empezaremos con un ejemplo mínimo, en el que entrenaremos nuestro MLP con el dataset MNIST.
Además del modelo y los datos necesitaremos dos elementos más para el enterenamiento:
- Una función de pérdida (medirá el error del modelo)
- Un optimizador (se encargará de actualizar los parámetros del modelo para minimizar la función de pérdida)
En ambos casos, Pytorch nos ofrece una amplia gama de opciones, que podemos consultar en la documentación.
Puedes aprender más sobre estos conceptos aquí.
# instanciamos nuestro dataset
dataset = Dataset(X, Y)
dataloader = torch.utils.data.DataLoader(dataset, batch_size=100, collate_fn=dataset.collate_fn)
# instanciamos nuestro modelo
model = Model(784, 100, 10)
# definimos la función de pérdida y el optimizador
criterion = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters())
# bucle de entrenamiento
epochs = 5
for e in range(1, epochs+1):
print(f"epoch: {e}/{epochs}")
for batch_ix, (x, y) in enumerate(dataloader):
optimizer.zero_grad() # reseteamos los gradientes
outputs = model(x) # calculamos las salidas
loss = criterion(outputs, y) # calculamos la pérdida
loss.backward() # calculamos los gradientes
optimizer.step() # actualizamos los parámetros
if batch_ix % 100 == 0:
loss, current = loss.item(), (batch_ix + 1) * len(x)
print(f"loss: {loss:.4f} [{current:>5d}/{len(dataset):>5d}]")
epoch: 1/5
loss: 2.3083 [ 100/70000]
loss: 0.4708 [10100/70000]
loss: 0.4804 [20100/70000]
loss: 0.3436 [30100/70000]
loss: 0.2486 [40100/70000]
loss: 0.2684 [50100/70000]
loss: 0.1554 [60100/70000]
epoch: 2/5
loss: 0.1684 [ 100/70000]
loss: 0.2374 [10100/70000]
loss: 0.2315 [20100/70000]
loss: 0.2300 [30100/70000]
loss: 0.1569 [40100/70000]
loss: 0.1538 [50100/70000]
loss: 0.0832 [60100/70000]
epoch: 3/5
loss: 0.1205 [ 100/70000]
loss: 0.1479 [10100/70000]
loss: 0.1593 [20100/70000]
loss: 0.2072 [30100/70000]
loss: 0.1202 [40100/70000]
loss: 0.1048 [50100/70000]
loss: 0.0513 [60100/70000]
epoch: 4/5
loss: 0.1045 [ 100/70000]
loss: 0.1018 [10100/70000]
loss: 0.1186 [20100/70000]
loss: 0.1899 [30100/70000]
loss: 0.1018 [40100/70000]
loss: 0.0798 [50100/70000]
loss: 0.0350 [60100/70000]
epoch: 5/5
loss: 0.0954 [ 100/70000]
loss: 0.0766 [10100/70000]
loss: 0.0974 [20100/70000]
loss: 0.1619 [30100/70000]
loss: 0.0900 [40100/70000]
loss: 0.0665 [50100/70000]
loss: 0.0270 [60100/70000]
Si todo va según lo planeado, deberíamos ver como la función de pérdida va disminuyendo a medida que el modelo va aprendiendo. En un ejemplo real, sin embargo, haremos un entrenamiento más sofisticado, en el que dividiremos nuestro dataset en dos partes: una para entrenar y otra para validar el modelo; y también trackearemos diversas métricas para evaluar el rendimiento del modelo (aunque en un caso real debería usar algun sistema de trackeado como Weights and Biases o MLFLow).
Puedes aprender más sobre este tema aquí.
# instanciamos nuestro dataset
dataset = {
"train": Dataset(X[:60000], Y[:60000]),
"val": Dataset(X[60000:], Y[60000:])
}
dataloader = {
'train': torch.utils.data.DataLoader(dataset['train'], batch_size=100, collate_fn=dataset['train'].collate_fn),
'val': torch.utils.data.DataLoader(dataset['val'], batch_size=100, collate_fn=dataset['val'].collate_fn)
}
# instanciamos nuestro modelo
model = Model(784, 100, 10)
# definimos la función de pérdida y el optimizador
criterion = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters())
# bucle de entrenamiento
epochs = 5
for e in range(1, epochs+1):
print(f"epoch: {e}/{epochs}")
# entrenamiento
model.train()
for batch_ix, (x, y) in enumerate(dataloader['train']):
optimizer.zero_grad()
outputs = model(x)
loss = criterion(outputs, y)
loss.backward()
optimizer.step()
if batch_ix % 100 == 0:
loss, current = loss.item(), (batch_ix + 1) * len(x)
print(f"loss: {loss:.4f} [{current:>5d}/{len(dataset):>5d}]")
# validación
model.eval()
val_loss, val_acc = [], []
with torch.no_grad():
for batch_ix, (x, y) in enumerate(dataloader['val']):
outputs = model(x)
loss = criterion(outputs, y)
val_loss.append(loss.item())
val_acc.append((outputs.argmax(1) == y).float().mean().item())
print(f"val_loss: {np.mean(val_loss):.4f} val_acc: {np.mean(val_acc):.4f}")
epoch: 1/5
loss: 2.3281 [ 100/60000]
loss: 0.4712 [10100/60000]
loss: 0.4959 [20100/60000]
loss: 0.3392 [30100/60000]
loss: 0.2554 [40100/60000]
loss: 0.2822 [50100/60000]
val_loss: 0.2487 val_acc: 0.9275
epoch: 2/5
loss: 0.2017 [ 100/60000]
loss: 0.2150 [10100/60000]
loss: 0.2756 [20100/60000]
loss: 0.2219 [30100/60000]
loss: 0.1550 [40100/60000]
loss: 0.1612 [50100/60000]
val_loss: 0.1753 val_acc: 0.9474
epoch: 3/5
loss: 0.1222 [ 100/60000]
loss: 0.1526 [10100/60000]
loss: 0.1959 [20100/60000]
loss: 0.1804 [30100/60000]
loss: 0.1038 [40100/60000]
loss: 0.1215 [50100/60000]
val_loss: 0.1395 val_acc: 0.9580
epoch: 4/5
loss: 0.0852 [ 100/60000]
loss: 0.1147 [10100/60000]
loss: 0.1590 [20100/60000]
loss: 0.1604 [30100/60000]
loss: 0.0801 [40100/60000]
loss: 0.1088 [50100/60000]
val_loss: 0.1198 val_acc: 0.9637
epoch: 5/5
loss: 0.0675 [ 100/60000]
loss: 0.0874 [10100/60000]
loss: 0.1338 [20100/60000]
loss: 0.1493 [30100/60000]
loss: 0.0692 [40100/60000]
loss: 0.1007 [50100/60000]
val_loss: 0.1090 val_acc: 0.9664
Como puedes observar podemos poner el modelo en modo entrenamiento o evaluación con las funciones train y eval. Esto es importante ya que algunas capas (como Dropout o BatchNorm) tienen comportamientos diferentes en cada modo. Además, durante la validación, usamos el contexto torch.no_grad para que no se calcule el gradiente, ya que no lo necesitamos (esto hará que el entrenamiento sea más rápido).
Consejos para mejores prestaciones
En este ejemplo sencillo todo va rápido, pero en casos reales puede que tengamos que esperar mucho tiempo a que el modelo se entrene. Para ello, podemos hacer algunas cosas para mejorar la velocidad de entrenamiento
dataset = {
"train": Dataset(X[:60000], Y[:60000]), # 60.000 imágenes para entrenamiento
"val": Dataset(X[60000:], Y[60000:]) # 10.000 imágenes para validación
}
# aumentamos el tamaño del batch para aprovechar la GPU, carga en paralelo y movemos los datos a la GPU
dataloader = {
'train': torch.utils.data.DataLoader(dataset['train'], batch_size=1000, shuffle=True, num_workers=4, pin_memory=True, collate_fn=dataset['train'].collate_fn),
'val': torch.utils.data.DataLoader(dataset['val'], batch_size=1000, num_workers=4, pin_memory=True, collate_fn=dataset['val'].collate_fn)
}
model = Model(784, 100, 10)
# compilamos el modelo
# model = torch.compile(model)
# torch.backends.cuda.matmul.allow_tf32 = True # allow tf32 on matmul
# torch.backends.cudnn.allow_tf32 = True # allow tf32 on cudnn
# movemos el modelo a la GPU
model.cuda()
criterion = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters())
epochs = 5
for e in range(1, epochs+1):
print(f"epoch: {e}/{epochs}")
# entrenamiento
model.train()
for batch_ix, (x, y) in enumerate(dataloader['train']):
x, y = x.cuda(), y.cuda() # movemos los datos a la GPU
optimizer.zero_grad()
with torch.autocast(device_type='cuda', dtype=torch.bfloat16): # automatic mixed precision
outputs = model(x)
loss = criterion(outputs, y)
loss.backward()
optimizer.step()
if batch_ix % 10 == 0:
loss, current = loss.item(), (batch_ix + 1) * len(x)
print(f"loss: {loss:.4f} [{current:>5d}/{len(dataset['train']):>5d}]")
# validación
model.eval()
val_loss, val_acc = [], []
with torch.no_grad():
for batch_ix, (x, y) in enumerate(dataloader['val']):
x, y = x.cuda(), y.cuda() # movemos los datos a la GPU
with torch.autocast(device_type='cuda', dtype=torch.bfloat16): # automatic mixed precision
outputs = model(x)
loss = criterion(outputs, y)
val_loss.append(loss.item())
val_acc.append((outputs.argmax(1) == y).float().mean().item())
print(f"val_loss: {np.mean(val_loss):.4f} val_acc: {np.mean(val_acc):.4f}")
epoch: 1/5
loss: 2.3098 [ 1000/60000]
loss: 1.7387 [11000/60000]
loss: 1.1731 [21000/60000]
loss: 0.8057 [31000/60000]
loss: 0.6480 [41000/60000]
loss: 0.4715 [51000/60000]
val_loss: 0.4343 val_acc: 0.8917
epoch: 2/5
loss: 0.4613 [ 1000/60000]
loss: 0.3864 [11000/60000]
loss: 0.3995 [21000/60000]
loss: 0.3641 [31000/60000]
loss: 0.3603 [41000/60000]
loss: 0.3143 [51000/60000]
val_loss: 0.3096 val_acc: 0.9154
epoch: 3/5
loss: 0.3157 [ 1000/60000]
loss: 0.2750 [11000/60000]
loss: 0.3310 [21000/60000]
loss: 0.3152 [31000/60000]
loss: 0.3120 [41000/60000]
loss: 0.2451 [51000/60000]
val_loss: 0.2718 val_acc: 0.9231
epoch: 4/5
loss: 0.2578 [ 1000/60000]
loss: 0.2539 [11000/60000]
loss: 0.2705 [21000/60000]
loss: 0.2583 [31000/60000]
loss: 0.2628 [41000/60000]
loss: 0.2335 [51000/60000]
val_loss: 0.2404 val_acc: 0.9321
epoch: 5/5
loss: 0.2486 [ 1000/60000]
loss: 0.2486 [11000/60000]
loss: 0.2587 [21000/60000]
loss: 0.2530 [31000/60000]
loss: 0.2613 [41000/60000]
loss: 0.2532 [51000/60000]
val_loss: 0.2203 val_acc: 0.9358
En el caso de entrenar modelos muy grandes, es posible hacerlo en varias GPUs para acelerar el entrenamiento. Puedes aprender más sobre este tema aquí.
Por último, te dejo también mi receta de entrenamiento de redes neuronales, que puedes seguir a la hora de diseñar y entrenar tus modelos.
Exportando modelos
Una vez entrenado tu modelo es posible que quieras exportarlo para usarlo en otro proyecto o incluso en producción. Para ello, Pytorch nos ofrece diferents opciones para exportar nuestro modelo. La forma más sencilla es usar la función torch.save, que nos permite guardar el modelo en un fichero.
torch.save(model, 'model.pth')
Una vez guardado lo podrás leer desde cualquier otro proyecto usando la función torch.load.
loaded = torch.load('model.pth')
loaded
Model(
(fc1): Linear(in_features=784, out_features=100, bias=True)
(relu): ReLU()
(fc2): Linear(in_features=100, out_features=10, bias=True)
)
Una alternativa más eficiente y flexible consiste en exporar el state_dict
torch.save(model.state_dict(), 'model.ckpt')
model = Model(784, 100, 10)
model.load_state_dict(torch.load('model.ckpt'))
model
Model(
(fc1): Linear(in_features=784, out_features=100, bias=True)
(relu): ReLU()
(fc2): Linear(in_features=100, out_features=10, bias=True)
)
Además del modelo podemos guardar el state_dict del optimizador para poder continuar el entrenamiento en otro momento, por lo que es muy útil para guardar checkpoints.
En ambos casos vas a necesitar el mismo código usado a la hora de exportar el modelo para poder cargarlo. Esto puede ser un inconveniente en muchos casos, por lo que una buena alternativa es usar torch.script para serializar el modelo.
model_scripted = torch.jit.script(model)
model_scripted.save('model_scripted.pt')
model = torch.jit.load('model_scripted.pt')
model
RecursiveScriptModule(
original_name=Model
(fc1): RecursiveScriptModule(original_name=Linear)
(relu): RecursiveScriptModule(original_name=ReLU)
(fc2): RecursiveScriptModule(original_name=Linear)
)
Esta aproximación permite desacoplar el código de los pesos del modelo, sin embargo vamos a seguir necesitando Pytorch para poder cargar el modelo (lo cual no siempre será posible en función del entorno de producción del modelo). Para ello podemos usar ONNX para exportar el modelo a un formato estándar que puede ser usado por cualquier framework.
torch.onnx.export(
model.cpu(),
torch.randn(10, 784),
'model.onnx',
opset_version=11,
input_names=['input'],
output_names=['output'],
dynamic_axes={'input': {0: 'batch_size'}, 'output': {0: 'batch_size'}
})
======= Diagnostic Run torch.onnx.export version 2.0.0.dev20230213+cu117 =======
verbose: False, log level: Level.ERROR
======================= 0 NONE 0 NOTE 0 WARNING 0 ERROR ========================
import onnx
onnx_model = onnx.load('model.onnx')
onnx.checker.check_model(onnx_model)
En Python podemos usar la librería onnxruntime para cargar el modelo y usarlo en producción, en los que no es necesario que Pytorch esté instalado (funciona directamente con NumPy).
import onnxruntime as ort
ort_session = ort.InferenceSession('model.onnx')
ort_inputs = {ort_session.get_inputs()[0].name: torch.randn(16, 784).numpy()}
ort_outs = ort_session.run(None, ort_inputs)
ort_outs[0].shape
(16, 10)
Ecosistema
Pytorch es un proyecto muy activo, con una gran comunidad de desarrolladores que contribuyen a su mejora. Además, cuenta con una gran cantidad de librerías que nos permiten extender sus funcionalidades. Algunos ejemplos son:
Torchvision: librería de visión por computador paraPytorch, puedes aprender más sobre ella aquí.Torchtext: librería de procesamiento de lenguaje natural paraPytorch, puedes aprender más sobre ella aquí.Huggingface: gran ecosistema conocido por su librería detransformerspero que poco a poco a evolucionado incluyendo muchas otras funcionalidades, puedes aprender más sobre ella aquí.Torhcmetrics: librería de métricas paraPytorch.
De entre todas ellas, destacaría Pytorch Lightning, una librería que nos hace la vida más fácil a la hora de entrenar modelos y que veremos en detalle en el siguiente post ya que también acaba de lanzar su versión 2.0.